Доклад/ Транспорт – Железнодорожные перевозки
УДК:629.423.053.3
Гуряев А.В,
Иванов С. Ф, Корбан В. В, Иванов В. А.
Закрытое
акционерное общество Научно-производственный центр информационных и
транспортных систем, Самарский государственный университет путей сообщения
оптимизация
режимов движения и нормирование топливно-энергетических ресурсов на тягу
поездов
В работе представлены результаты исследований, проводимых сотрудниками
НПЦ «ИНФОТРАНС» с использованием компьютеризированных динамометрических и тормозоиспытательных
вагонов-лабораторий (квл-д, квл-т,
квл-дт).
В работе
представлены методики тяговых расчетов на борту компьютеризированных
вагонов-лабораторий и алгоритм автоматизированной разработки режимных карт
ведения поезда. Приведены примеры расчетных траекторий движения на рис.1
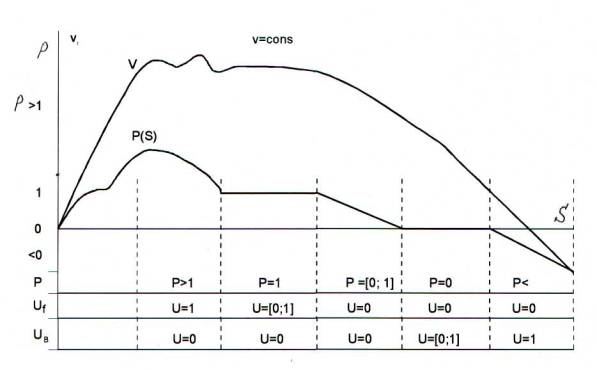
Рис.1. Управляющие
воздействия на элементарном цикле движения при автоматизированной подготовке
режимных карт
В задаче
оптимизации режимов ведения поезда используется гамильтониан λ и
безразмерный критерий Р [1],6],8].
При
подготовке режимных карт на борту компьютеризированных вагонов-лабораторий -
динамометрического (КВЛ-Д) и тормозоиспытательного (КВЛ-Т) - необходимо
оценивать степень оптимальности ведения поезда по различным критериям. Одним из
важнейших источников информации при прогнозировании траектории движения поезда
и режимов работы силовой установки локомотива являются тяговые расчеты [1]. В
разработанной программе тяговых расчетов учитываются распределенная масса
поезда, перевалистость профиля, постоянные ограничения скорости на участке,
временные ограничения на момент проведения опытных поездок, метеопрогноз на
время поездки, фактическое состояние погоды; предусматривается расчет
траектории с остановкой в любой точке пути по различным причинам (запрещающий
сигнал светофора, снижение скорости до значения меньше расчетного, перегрев
ТЭД, неисправности, порчи и т.д.).
Производство
тяговых расчетов на борту КВЛ-Д и КВЛ-Т при тягово-энергетических испытаниях
локомотивов позволяет разрабатывать режимные карты ведения поездов по различным
критериям оптимальности с различной массой и длиной поездов, устанавливать
наиболее обоснованно и точно критические весовые нормы, прогнозировать расход
(рис. 2,3) топливно-энергетических ресурсов (ТЭР) на тягу [2] и разрабатывать
рекомендации по нормированию ТЭР, оптимизировать сочетания режимов рекуперации,
реостатного и пневматического торможений [3, 4, 5].
При
фиксированных значениях Р=![]() , V и S
величина H является функцией управляющих
воздействий Uf и Uвт. По всей видимости для обеспечения максимума Н необходимо выбирать эти
управляющие воздействия равными 0 или 1, если выражение
, V и S
величина H является функцией управляющих
воздействий Uf и Uвт. По всей видимости для обеспечения максимума Н необходимо выбирать эти
управляющие воздействия равными 0 или 1, если выражение
![]() и
и ![]() (1)
(1)
в
выражении
![]() (2)
(2)
Если эти
выражения равны 0, то Uf и Uвт могут принимать любые значения с учетом ограничений
0
≤ Uf ≤ 1, 0
≤ Uвт ≤ 1
В
соответствии с физическим смыслом траектории рассмотрены последовательно все
возможные диапазоны значений P(S),
соответствующие оптимальному режиму управления на единичном (элементарном)
цикле движения поезда.
Рассмотрим
эти диапазоны последовательно в соответствии с типичным циклом движения.
1.
Разгон и движение с максималь Uf=0; Uвт ной силой тяги Fmax,
условие, если P>1,
то Uf=1, Uвт=0.
2.
Движение с постоянной скоростью в режиме стабилизации – Vconst,
условие, если Р=1, то Uf ( [0;1], Uвт=0.
3.
Режим выбега, движение поезда по инерции Fк=0; Вт=0; Vvar ↓↑ (c изменением
скорости),
условие, если Р ([0;1], то Uf=0, Uвт=0.
4.
Служебное торможение для поддержания скорости движения в допустимых
пределах на вредных спусках – режим стабилизации торможением Вт≠max,
Fк=0,
условие, если Р=0, то Uf=0; Uвт ([0;1].
5.
Режим торможения с максимальной интенсивностью Вт max;
условие, если Р<0, то Uf=0; Uвт=1.
Где ![]() - вспомогательные
переменные;
- вспомогательные
переменные;
V – скорость;
S – путь;
Р=-![]() /(
/(![]() V), P
V), P![]() ;
;
Uf – управление тягой;
Uвт – управление
тормозами;
Вт – тормозная сила;
f – удельная сила тяги;
![]() - основное сопротивление
движению;
- основное сопротивление
движению;
![]() - сопротивление
движению от плана и профиля пути.
- сопротивление
движению от плана и профиля пути.
Алгоритм
автоматизированной разработки режимных карт представлен на рис. 2


Расход электроэнергии по
главному генератору тепловоза определяется интегралом по времени от
потребляемой мощности:
 ,
,
где: ![]() - время хода по
перегону;
- время хода по
перегону;
![]() - напряжение на
клеммах главного генератора, среднее на участке;
- напряжение на
клеммах главного генератора, среднее на участке;
![]() - ток главного
генератора, средний на участке.
- ток главного
генератора, средний на участке.
При наличии данных
динамометрических испытаний можно использовать другой, энергетический критерий:
 ,
,
где ![]() - сила тяги тепловоза
с учетом корректировки (рис 3);
- сила тяги тепловоза
с учетом корректировки (рис 3);
![]() - средняя скорость
поезда;
- средняя скорость
поезда;
![]() - КПД тягового
привода.
- КПД тягового
привода.
Для обеспечения
безопасности движения поезда должно удовлетворять всем техническим
ограничениям. К ним относятся в первую очередь ограничения по допустимым
максимальным скоростям ![]() (как по конструкции
локомотива, так и по состоянию пути) – так называемое ограничение на фазовые
координаты:
(как по конструкции
локомотива, так и по состоянию пути) – так называемое ограничение на фазовые
координаты:
0<V≤![]()
а также ограничение на управление,
силу тяги, ток тягового двигателя, силу торможения
0<F≤Fmax;
0≤IТЭД max(V); 0≤ВТ≤
ВТmax(V).
При фиксированных
значениях ![]() , V и S величина Н является функцией управляющих воздействий Uf и UВТ. По всей видимости для обеспечения максимума Н
необходимо выбирать эти управляющие воздействия равными 0 и 1, если выражение
, V и S величина Н является функцией управляющих воздействий Uf и UВТ. По всей видимости для обеспечения максимума Н
необходимо выбирать эти управляющие воздействия равными 0 и 1, если выражение
![]() и
и ![]()
в выражении ![]()
![]()
Если эти выражения равны
0, то Uf и UВТ могут принимать любые значения с учетом ограничений
0≤Uf≤1, 0≤UВТ≤1
В соответствии с физическим смыслом
траектории рассмотрим последовательно все возможные диапазоны значений P(S),
соответствующие оптимальному режиму управления на единичном (элементарном)
цикле движения поезда (рис 1,2)
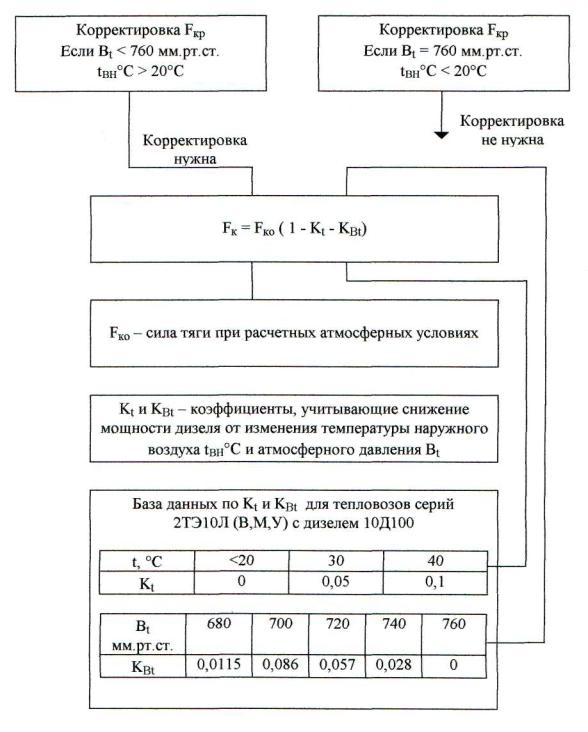
Рис.3 Корректировка
расчетной силы тяги Fкр у тепловозов
Изложенная методика может служить методическим основанием для
совершенствования систем ”Автомашинист”, систем управления САУД, САУТ в
сочетании с бортовыми средствами контроля КЛУБ и электронными маршрутами
машиниста (ЭММ), подобно системам автоматизации управления на ж.д. транспорте
Германии, Франции, Чехии [6].
Тяговые расчеты с оценкой механической работы локомотива могут служить
основой для использования в качестве показателя работы железнодорожного
транспорта - ”Трана” вместо используемого измерителя тонно-километры брутто (т.
км. бр) [7].
Использование методики автоматизированной подготовки режимных карт движения
поезда позволит объективно оценивать
динамику движения на уклонах, в кривых, в режиме выбега и торможения, что
должно исключить сходы по вине локомотивных бригад. [3]
Литература:
1. Микропроцессорные системы
автоведения электроподвижного состава /Л.А.Баранов, Я.М.Головичер и др. Под
ред. Л.А.Баранова - М. : Транспорт, 1990. - 272с,
2.
Корбан В.В. Оптимизация системы нормирования расхода топлива тепловозами
в грузовом движении. Кандидат, дисерт. Самара, 1995.- 170с,
3.
Карягин С.И. Повышение безопасности движения при эксплуатации
автотормозов подвижного состава с использованием компьютерной технологии.
Кандидат, диссерт., Самара, 2000. - 100с,
4.
А.С. РФ 97111681 от 10.07.97. Устройство определения эффективности
тормозных средств поезда. Иванов С.Ф., Засов В.А., Корбан В.В., Карягин С.И.,
Токарев Г.П. и др,
5.
А.С. РФ 98106759/20 от 16.02.99. Бюл. № 2. Устройство определения места
неисправности тормозных средств поезда. Иванов С.Ф., Засов В.А., Корбан В.В.,
Токарев Г.П. и др,
6.
Скива Л., Яначек Я., Ценек П. Энергетически оптимальное управление
транспортными системами: Перевод с чешского – Москва, Прага: Транспорт 1992. –
247с,
7.
Кочергин В. Г, Мариновский Э. С, Жуков И. М, Писоцкая Т.А Как оценивать
перевозочную работу. Железнодорожный транспорт №4 – 1991 г,
8.
Тяговые расчеты на борту
компьютеризированных вагонов-лабораторий / В. В. Корбан, С. Ф. Иванов, В. А.
Иванов. Материалы 3-й международной
научно-практической конференции. Актуальные проблемы развития ж.д. транспорта
2006 - 91с.