12.
Автоматизированные системы управления на производстве
К.т.н. Редькин Ю.В.
Морская государственная академия им. адм. Ф.Ф. Ушакова, г.
Новороссийск
ОБЕСПЕЧЕНИЕ ПОМЕХОУСТОЙЧИВОЙ РАБОТЫ СИСТЕМЫ СБОРА И ПЕРЕДАЧИ ДАННЫХ
Современные
системы сбора данных и оперативного диспетчерского
управления, как правило, являются двухуровневыми системами. Верхним уровнем
такой системы является диспетчерский пункт (ДП), а нижним – технологические
контроллеры (ТК). ДП включает в себя, как минимум, один компьютер диспетчера, снабженный
для связи с технологическими контроллерами контроллером сетевого промышленного
интерфейса. Компьютер ДП включенный
в сеть, генерирует запросы к ТК, получает от них данные, обрабатывает их и записывает
в базу данных, а также обеспечивает отображение состояния ТК на мониторе. Технологические
контроллеры производят съем аналоговых и дискретных сигналов с датчиков, установленных на
контролируемых объектах, управляют механизмами объектов, производят
тестирование своих систем, а также передают собранные данные на компьютер диспетчерского
пункта [1].
Технологические контроллеры, установленные на контролируемых объектах, работают в условиях сильных электромагнитных помех от
электрооборудования, работающего в непосредственной близости от него. Эти помехи,
особенно сильные в моменты пуска и остановки мощного электрооборудования, могут
привести к программно-аппаратным сбоям
и зависаниям контроллеров. Помимо этого, работа ТК с исполнительными
механизмами в составе сети контроллеров накладывает определенные требования на
включение/выключение отдельных контроллеров сети. Так, при включении ТК должен
быть обеспечен его гарантированный сброс и инициализация. При выключении ТК
работоспособность остальных контроллеров сети не должна быть нарушена. При
инициализации (сбросе) контроллера по инициативе компьютера ДП, также не должно
произойти нарушение работы других ТК, включенных в сеть.
Задача обеспечения помехоустойчивой работы технологических контроллеров в
условиях сильных электромагнитных помех от электрооборудования может быть решена
путем применения специальных схем слежения за
питанием контроллеров и схем, отслеживающие программные и
аппаратные сбои контроллеров. Основная
задача супервизоров состоит в том, чтобы
отслеживать ситуации, которые могут привести к неустойчивой работе контроллеров
и, при необходимости, проводить их реинициализацию, или так
называемый сброс, переводящий контроллеры в предопределенное устойчивое
состояние.
Структурная схема, показывающая взаимодействие супервизоров и технологического
контроллера представлена на рис.1. Ее основу составляют супервизор питания (Power Supervisory – PS) и супервизор сбоя
работы (Fail Supervisory
– FS),
выходы которых объединены элементом ![]() .
.
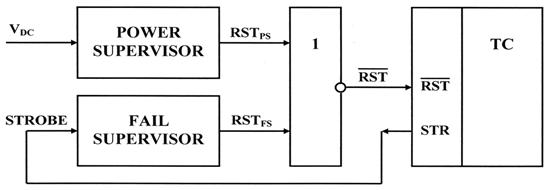
Рис.1.
Схема защиты контроллера от зависаний и слежения за питанием
Рассмотрим работу супервизоров слежения за питанием и защиты технологического
контроллера от зависаний подробнее.
Супервизор PS включения/исчезновения
напряжения питания должен содержать схему слежения за напряжением питания, которая
будет удерживать ТК в состоянии сброса, если напряжение питания VDC контроллера не находится в допустимых границах.
Функциональная схема супервизора питания представлена
на рис.2. Она состоит из компаратора (Comparer – CMP),
таймера
задержки сброса (Delay Timer – DT) и
логического элемента ИЛИ. Основным
элементом супервизора питания является компаратор CMP, на входы которого
поданы напряжение питания VDC контроллера (через
делитель) и опорное напряжение K´VST , где K–
коэффициент передачи делителя, а VST – напряжение стабилизации.
Выходное напряжение компаратора удерживает контроллер в состоянии сброса, пока
напряжение питания не превысит напряжение стабилизации. После срабатывания
компаратора запускается таймер DT, удерживающий сигнал сброса
на выходе элемента ИЛИ еще некоторое время, называемым временем стабилизации.
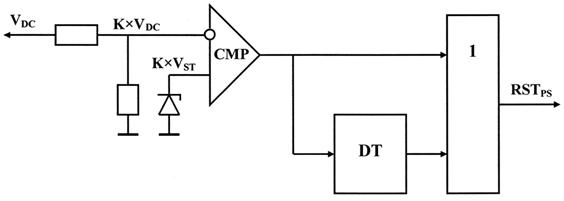
Рис.2.
Функциональная схема супервизора питания
Сброс при включении питания (Power-on Reset – POR).
Супервизор питания будет удерживать ТК в состоянии сброса, пока напряжение питания VDC
не превысит
в процессе включения заданный уровень стабилизации VST. После превышения уровня
VST запускается таймер DT задержки сброса, который
в течение заданного таймаута удерживает сигнал сброса, что позволяет напряжению
питания стабилизироваться. После окончания формирования задержки сигнал сброса RSTPS супервизора питания снимается и
происходит запуск ТК.
Сброс
при исчезновении (падении ниже заданной величины)
питания (Power-fail Reset – PFR). Когда при выключении или
сбое питания напряжение питания VDC опускается
ниже уровня VST, схема слежения за
напряжением питания установит на выводе ![]() низкий логический уровень и
переведет ТК в состояние сброса. Когда VDD
превысит
уровень VST, ТК выйдет из состояния
сброса точно так же, как при сбросе типа POR.
низкий логический уровень и
переведет ТК в состояние сброса. Когда VDD
превысит
уровень VST, ТК выйдет из состояния
сброса точно так же, как при сбросе типа POR.
Супервизор сбоя работы (Fail Supervisory
– FS)
должен отслеживать программные и аппаратные сбои
контроллеров. Здесь выделим три источника, которые
могут перевести ТК в состояние сброса: исчезновения тактовых импульсов
контроллера; отсутствие строб-импульсов, генерируемых
программно; аппаратный сброс по сетевому таймеру.
Если в контроллере
происходит программный/аппаратный сбой, то на вход супервизора сбоя работы перестают поступать контрольные импульсы STROBE, что приводит к срабатыванию
таймера и генерации сигнала сброса RSTFS. Длительность сигнала
сброса определяется таймером задержки сброса, который в течение заданного
таймаута удерживает сигнал сброса в активном состоянии. После окончания
формирования задержки сигнал сброса RSTFS снимается
и происходит запуск ТК.
Рассмотренные
методы защиты технологических контроллеров от зависаний позволяют увеличить
помехоустойчивость работы технологических контроллеров в условиях сильных электромагнитных помех. Супервизор включения/исчезновения
напряжения питания контроллера позволяет корректно отрабатывать перебои
в системе питания, вызванные
включением/отключением мощных потребителей энергии на объекте контроля. Супервизор сбоя работы позволяет
фиксировать и устранять программно-аппаратные зависания контроллера.
В заключение отметим, что все эти
средства, взятые по отдельности, не могут гарантировать устойчивой работы в
условиях сильных электромагнитных помех от
электрооборудования. Только их комплексное применение с учетом конкретных
условий работы на объекте контроля и управления может обеспечить помехоустойчивую
работу контроллеров в системе сбора и передачи данных.
Литература:
1.
Бузенков И.И., Редькин Ю.В. Информационные аспекты
интеграции больших промышленных систем // Известия вузов. Сев.-Кавк. регион. Техн.
науки. Спец. выпуск. Проблемы водного транспорта. Ч. I. – Ростов-на-Дону: РГУ.–
2004. – С. 104-108.