РАЗРАБОТКА СИСТЕМ ВЕКТОРНОГО УПРАВЛЕНИЯ
АСИНХРОННЫМИ ПРИВОДАМИ ЭЛЕКТРОМОБИЛЯ
Фам Нгок Тхач, студент гр. 141471/01и, кафедра Э,
ТулГУ
Научный руководитель: Степанов В.М., д.т.н., про.
В
данной работе рассматривается система векторного управления асинхронным
двигателем на базе промышленного преобразователя частот.
Существует
несколько типов электродвигателей, которые используются для привода автомобиля.
В том числе популярными являются постоянные, синхронные и асинхронные двигатели.
Из них наиболее простыми, надёжными и дешёвыми электродвигателями являются
асинхронные двигатели с короткозамкнутым ротором (АД). Однако при всех своих
достоинствах АД имеют весомый недостаток - сложность управления из-за сложности
и большого объёма математических вычислений в реальном времени. А АД простыми
методами практически невозможно. Поэтому, несмотря на их широкое
распространение, применялись они преимущественно в нерегулируемых
электроприводах (ЭП), либо в ЭП с невысокими требованиями к качеству
регулирования.
С
другой стороны АД реализуются на аналоговой технике, либо на базе цифровых
микросхем малой и средней степени интеграции, что не позволяет добиться
высокого качества регулирования. С развитием микропроцессорной техники с
функциями прямого цифрового управления силовыми ключами, а также силовой
электроники задача построения точных систем управления скоростью и моментом АД
стала реализуемой.
На
сегодняшний день в мире выпускается большое количество преобразователей частоты
(ПЧ), предназначенных для управления асинхронным двигателем (АД). Причём
управление осуществляется по различным алгоритмам, включая как самые простые
(скалярное управление), так и наиболее сложные и точные (векторное управление,
векторное бездатчиковое управление). Однако по понятным причинам эти ПЧ не
находят массового применения в отечественной промышленности, поэтому до сих пор
в отечественной промышленности работает большое количество регулируемых ЭП на
базе двигателей постоянного тока (ДПТ), которые имеют серьёзные недостатки и
жёсткие ограничения по условиям применения. Во всём мире привода на базе ДПТ
постепенно вытесняются и заменяются на другие типы приводов, причём многие из
них заменяются асинхронным приводом, который на сегодняшнем уровне развития
преобразовательной и управляющей микропроцессорной техники ничуть не уступает
по качеству регулирования приводу постоянного тока, а зачастую и превосходит
его.
Векторное
управление является методом управления синхронными и асинхронными двигателями, не только
формирующим гармонические токи (напряжения) фаз (скалярное
управление), но и обеспечивающим управление магнитным потоком
ротора. Общий принцип моделирования и построения системы управления АД
заключается в том, что для этого используется система координат, постоянно
ориентированная по направлению какого-либо вектора, определяющего
электромагнитный момент. Тогда проекция этого вектора на другую ось координат и
соответствующее ей слагаемое в выражении для электромагнитного момента будут
равны нулю, и формально оно принимает вид, идентичный выражению для
электромагнитного момента двигателя постоянного тока, который пропорционален по
величине току якоря и основному магнитному потоку.
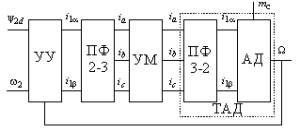
Рис.1.
Структура системы векторного управления АД
Независимо от того, какой вектор используется для управления АД (тока или
напряжения), на выходе устройства управления формируются синусоидальные сигналы
с переменой амплитудой, частотой и фазой, соответствующие мгновенным значениям
проекций вектора тока или напряжения статора на неподвижные оси координат. Эти
сигналы должны быть усилены по мощности с минимальными искажениями. Поэтому
между выходом устройства управления (УУ) и статором АД необходимо включить
усилитель мощности (УМ) (рис. 1). В качестве УМ могут использоваться устройства
непрерывного и дискретного типов. Очевидно, что при мощностях выше нескольких
сотен Ватт аналоговые усилители мощности не могут применяться, поэтому в
приводе с векторным управлением в основном используются транзисторные и
тиристорные инверторы с различными законами управления и непосредственные
преобразователи частоты. Для правильной работы системы векторного управления УМ
должны обладать единичной передаточной функцией, т.к. ошибка формирования тока
или напряжения вызывает нарушение ориентации соответствующего вектора. На
практике достаточно, чтобы частота коммутации УМ при всех режимах работы
системы приблизительно на порядок превосходила частоту основной гармоники.
В
результате работы проанализированы существующие структуры систем векторного
управления. В качестве оптимальной для реализации на специализированных
микроконтроллерах с функциями прямого цифрового управления двигателями выбрана
структура в координатах (х,у) с ориентацией оси х по вектору потокосцепления
ротора. Разработана методика синтеза системы векторного управления, которая
позволяет оценить динамические возможности привода как по моменту, так и по
скорости.