Современные информационные технологии. 1
Сокол Г.И., Олейник А.Л., Чубаров А.В.
Днепропетровский национальный университет
компьютерная графика в Кинематике машин
Известны учебные
материалы по курсу теории механизмов и машин с применением компьютерной графики,
разработанные в различных ВУЗах Украины, России и других стран. Применительно к
специфике специальностей физико-технического факультета необходимо разработать
новые задания для студентов с применением компьютерных технологий.
Целью
настоящей работы является разработка методики построения планов механизмов,
скоростей и ускорений в разделе «Кинематика» курса «Теория механизмов и машин».
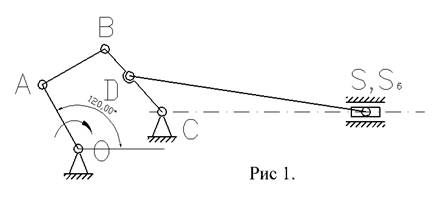
В качестве примера выберем кинематическую схему механизма
грохота. Будем использовать редакторы AutoCAD (версия 2004).
Построение плана механизма
Для примера возьмём
механизм грохота.
В начале запустим AutoCAD и установим необходимые настройки:
1. Сетка и привязка – значение
параметра Snap рекомендуется установить равным 1, а
параметра Gird - 5.
2. В опции OSNAP отметим следующие параметры: Endpoint, Center, Intersection.
3. Для удобства, на рабочее поле
необходимо вынести следующие панели инструментов: Draw, Modify, Object Snap, Dimension.
4. Параметры печати определяются
самостоятельно в зависимости от назначения чертежа.
5.Устанавливаем необходимое
количество слоёв, для чего включаем параметр LWT.
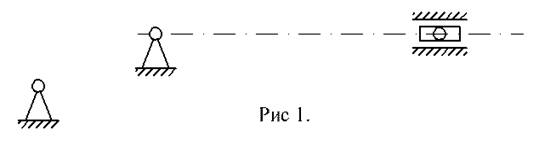
6.Определяем масштабный коэффициент
μl [1] и в соответствии с ним рассчитываем длины отрезков на
чертеже. Вычерчиваем элементы стойки (рис. 1).
Далее чертим все остальные
звенья механизма в заданном масштабе при помощи инструмента line. Чертим звенья, прикрепленные к
стойке.
Используем следующую
процедуру:
1.Первую точку ставим в центре
шарнира, привязанного к стойке.
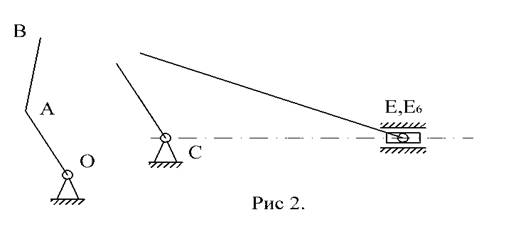
2.Используем относительные полярные
координаты: в командной строке записываем @L<φ, где L – длина звена, а φ – примерный
угол его поворота (угол отсчитывается от оси, направленной вправо против
часовой стрелки). На нашем примере, для звена AB @30<120; BC @35<120; CD @20<120; DS @100<160.
Начальную точку звена AB ставим в конце звена OA, а затем снова используем
относительные полярные координаты: @30<80 (рис. 2).
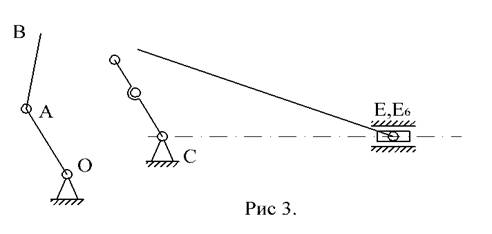
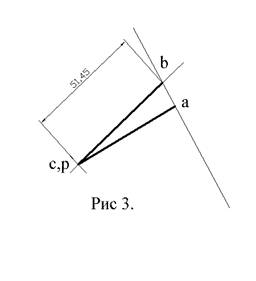
3. На концах звеньев
расставим шарниры А, E (рис. 3).
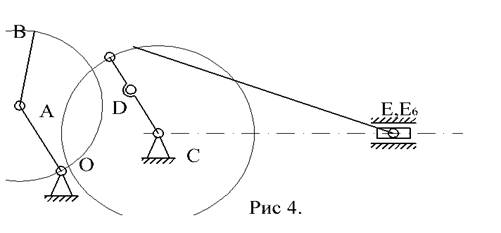
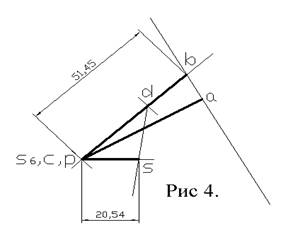
4. Обозначим точку D. Для этого в конце отрезка CD начертим окружность (инструмент circle), после чего удалим отрезок CD. Далее с помощью команды trim обрежем лишние элементы (см. рис.
4).
Приступим к
вычерчиванию механизма в конкретном положении:
1. Устанавливаем положение звена OA с помощью команды rotate.
2. С помощью команды move присоединяем звено AB к звену OA.
3.
Проводим две вспомогательные окружности: первую – на радиусе AB, вторую – на радиусе BC (рис. 4).
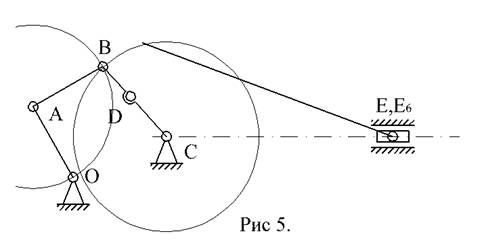
4. С
помощью команды rotate совмещаем звенья в точке пересечения
окружностей (рис. 5), после чего удаляем лишние линии построения.
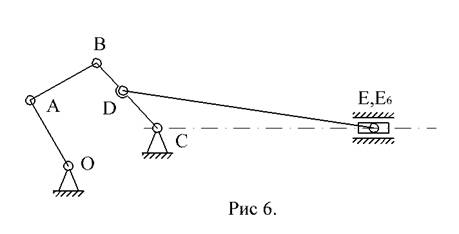
5.
Перемещаем конец звена DS к шарниру D на звене BC и построим окружность на радиусе DS, повернем звено DS к точке пересечения окружности и
штрихпунктирной линии и удаляем окружность.
6. Передвигаем ползун в новое
положение точки S (рис. 6).
7. Расставляем необходимые
обозначения.
План механизма вычерчен.
При изменении положения
механизма, поворачиваем звено OA на нужный угол и заново повторяем описанную выше процедуру.
Построение плана скоростей
В качестве примера
рассмотрим план механизма, который представлен на рис. 1. Для начала в меню Dimension→Style… в опции Modify на
вкладке Primary units в поле Angular dimension устанавливаем
точность измерения угла 0,00.
Далее выполняем следующую
процедуру:
1.
Обозначим полюс плана скоростей инструментом point ,
предварительно задав вид точки в опции Point style.
2.Проведем
горизонтальную линию из точки О вправо, измерим угол между этой линией и звеном
ОА.
Рис. 7
Задав масштабный
коэффициент μv, рассчитаем длину вектора скорости [1].
Измеренный нами угол равен 120,00,
звено вращается по часовой стрелке. Следовательно, угол поворота вектора
скорости равен 1200 - 900=300 (см.
рис. 7)
1.При
помощи относительных полярных координат из полюса построим отрезок заданной
длины, например, 500, и под углом 300 к горизонтали.
2.Измерим
угол между горизонталью и звеном AB = 29,250, отнимем 900 и проведем через
точку а направляющую под
рассчитанным углом =60,750 (рис. 8). Измерим угол между горизонталью
и звеном BD = 132,900. Проведем
направляющую из полюса под углом 132,900 - 900=42,900.
Проводим отрезок в точку пересечения направляющих, получаем вектор pb, измерив который найдем скорость точки А (рис. 9).
Рис. 9 Рис. 8
Рассчитаем скорость точки
D и обозначим ее
на плане скоростей. Проведем из полюса горизонтальную направляющую, а из точки d - перпендикулярную звену DS. Проведем отрезок ps, измерим его длину и найдем скорость ползуна (рис.
10).
Рис. 10
Построение плана ускорений
Построение плана
ускорений выполняется также, как и плана скоростей, теми же инструментами и
настройками. Используем рисунок 7, где начерчен план механизма в положении,
определенном обобщенной координатой – углом 1200. Необходимо
выполнить такие операции:
1.Обозначим
полюс плана скоростей инструментом point, предварительно задав вид точки в
опции Point style.
2.Т.к.
угол между звеном ОА и горизонталью составляет 1200, то направление
нормального ускорения будет направлено под углом 1800 - 1200
= 600 от горизонтали.
3.Задав масштабный коэффициент μа,
рассчитаем длину вектора ускорения [1].
4.Построим вектор нормального
ускорения отрезка АВ, который выходит из конца вектора ускорения а/. Для облегчения задачи
просто копируем звено АВ и переносим его в конец вектора а/с помощью привязки Snap to point.
Полученный вектор - нормальное ускорение звена AB. Проведем также тангенциальное
ускорение. Этот вектор перпендикулярен нормальному ускорению. Проведем
пунктирную направляющую вдоль тангенциального ускорения (рис. 11).
Рис. 11
 Точка С у нас неподвижна, поэтому её
ускорение равно нулю, а точка с/
на плане ускорений находится в полюсе.
Точка С у нас неподвижна, поэтому её
ускорение равно нулю, а точка с/
на плане ускорений находится в полюсе.
5.Найдем
нормальное ускорение звена BC и перпендикулярно ему построим тангенциальное, тоже
пунктирной линией. В полярных координатах под углом 1330 проведем из
полюса нормальное ускорение уже известной длины. Перпендикулярно ему с помощью
объектной привязки Snap to perpendicular проведем пунктиром тангенциальное
ускорение до пересечения с тангенциальным ускорением точки A относительно точки B.
6. Из
полюса проведем ускорение точки В, соединив линией полюс и пересечение двух пунктирных
линий.
Рис. 12
 Исходя из расчетов у нас выйдет что
ускорение точки В в два раза больше точки D, его вектор находится на средине
вектора ускорения b’. Проведем его (рис. 12).
Исходя из расчетов у нас выйдет что
ускорение точки В в два раза больше точки D, его вектор находится на средине
вектора ускорения b’. Проведем его (рис. 12).
7. По
направлению движения звена BS будет проходить нормальное ускорение звена DS, а перпендикулярно ему
тангенциальное ускорение этого звена. Проведем их с помощью измерения угла от
горизонтали в полярных координатах и привязки к середине вектора ускорения
точки В. А так же перпендикулярно ему проведем
тангенциальное ускорение пунктирной линией.
Рис. 13
![]() 9. Из полюса проведем тангенциальное ускорение точки S6, оно не имеет нормально и пунктирная
линия будет проходить через полюс до пересечения с тангенциальным ускорением
звена DS. В точки их пересечения будет полное ускорение точки S6, выходящее из полюса (рис. 13).
9. Из полюса проведем тангенциальное ускорение точки S6, оно не имеет нормально и пунктирная
линия будет проходить через полюс до пересечения с тангенциальным ускорением
звена DS. В точки их пересечения будет полное ускорение точки S6, выходящее из полюса (рис. 13).
Выводы
1.Разработана методика построения
планов механизмов, скоростей и ускорений с применением редактора AutoCad 2004.
2.Выполнен пример построения плана
механизма, скоростей и ускорений для механизма грохота.
Литература:
1. Артоболевский И.И. Теория механизмов
и машин. - М.: Наука, 1988. – 640 с.
2. Дэвид
Фрей «AUTOCAD 2005 на примерах» - К.:
«Юниор», 1999. - 540 с.