Kvetny R.N., doctor of sciences, professor;
Reminnyi О.А.,
undergraduate
Vinnitsa national technical university, Ukraine
Binary circular calculations method
for the objects classification using their form
Abstract
In this work a method for recognition of objects on
the basis of its geometrical correspondence of colored points’ distributions
that belong to the object in geometrical figures outlining the object. The
method works through finding object’s masses center and segregating the object
area to circles, and tracking statistical information which is contained inside
these circles. The resulting set of statistical information is simple for
subsequent processing and analysis.
In the article the tasks of object classification
using object’s form are considered. As an example, it can be recognition of
objects on a cooking table, classification of objects on a marine surface, photographed
using spectral camera from air, classification of the objects moving on the
street. As the recognition problems such can be considered as a remoteness and rotation
angle. It is possible to refer to such existent methods as the method of median
axes[1], recognition on the basis of the selected descriptors comparison[2-5],
for example angular descriptors[2]. As
the median axes method lack it is needed to mention calculable complication,
related to the previous selection of images’ skeletons and inexact recognition possibility
if the object is not in a standard position. Descriptors extraction variants
also can dissatisfy because of the calculations number, necessary for features selection.
In the real time systems described methods cannot be
capable. That is why there is a requirement in simple but however powerful
enough methods of classification. Basic advantage of binary circular
calculations method above the presented is its speed
of input image processing and minimal useful comparing information that also
results processing speed.
Binary circular calculations method
Assume that an image is preliminary segmented and its background
is filtered. For subsequent processing there is a binary black-and-white file
which represents the set of Boolean descriptions only. Examples of such
filtered images are presented on fig.1.



Figure 1. Picture
preprocessing result
Obtained object now can be put inside circle. The circle
center is the masses center of our object.
After finding the masses center it is needed to find
the radius of the outlining circle.
Example is the resulted image on fig. 2. An external
circle is basic. For expanding informing input information, it is possible to
build additional circles with the same center inside of an external circle using
a certain algorithm, and then analyze content of these circles like the first
circle. Such division looks like the method of spatial pyramids [6], however
gives more possibilities for spatially invariant images processing.
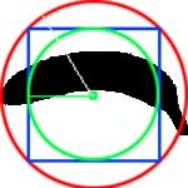

Figure 2. Object
inside the outlining circle
Now when we have such circles it is possible to add a
statistical analysis. In every circle it is possible to calculate a general
amount and amount of the painted pixels, then find correlation between these
amounts. Depending on the number of object classes and their complicity it is
possible to use any amount of internal circles as descriptors. Due to its simplicity
this method productivity considerably exceeds other local features selection
methods [7-8] productivity.
The results of analysis of concrete object will be
compared to the standard values for each of the classes, and the most proper
classes will be considered as the classification result.
The main advantages of the method are absence of scaling
and rotation angle dependence. Among disadvantages - the requirement in the
identical perspective and classes number restriction (at plenty classes the
probability of the situation when objects from different classes have identical
pixels correlation distribution will grow considerably). That is why using this
method reasonable only during work with the separate group of objects. To the
tasks that can fit this limitation, it is possible to mention classification of
objects in a certain location. For example, as it is shown in a section
Experiments, it can be classification of the fruits on the cooking table.
Binary circular calculations method algorithm
The general algorithm is presented on fig. 3. At first
using a classical formula (1) an image is translated from colored to grayscale.
Then using some certain threshold, grey-scale pixels are replaced with
black-and-white [9].
![]() (1)
(1)
where R - saturation of
red,
G - saturation of
green,
B - saturation of
blue color.
The binarized object masses center is found using formulas
(2):
 (2)
(2)
where xi, yi are coordinates of the point with mass mi.
As we consider input file to be binary, every point
can only accept painted (mi = 1) or unpainted (mi
=0) state.

Figure 3. Binary
circular calculations general algorithm
For circles’ radiuses calculation the next method is proposed.
From the center of the masses vectors are built in k directions. m - is a
subset of vectors that is later selected among k having longest length of path passing through an object (through
points which are painted). Mean value of these m vectors’ lengths will be the radius of the main outlining circle.
On fig. 4 a variant is presented using k
= 8, and example shows that only 5 of 8 vectors cross the object. For this
example it is better to choose m = 2
or m = 3 in order to build maximally
correct circle.
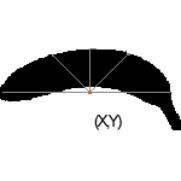
Figure 4. Main outlining circle radius search
For finding additional circles’ radiuses it is proposed
to use a formula:
![]() (3)
(3)
where Ri is a radius of the next internal circle;
Ri-1 is
a radius of the preliminary calculated circle;
The internal radius of the circle represented on fig.2
is calculated using it.
During comparison an algorithm moves from internal
circles to external and eliminates the unacceptable variants of classes.
Results are given as the list of the appropriate
classes names.
Experiments
Idealized conditions. For
the start we take 4 classes of objects (apple, banana, pear and pineapple) that
represent a group “Fruit”. On fig. 5 images used for the analysis are
presented.


















![]()









Figure 5.
Objects which was used in an experiment
Obviously they have different rotation angles and
sizes. In addition insignificant noise is present. Program Circle Processing
realizing the work of the algorithm represented on fig. 6. After setting up
expert estimations for each of the classes, using m = 12 and k = 2 got
result of 86 % successfully recognized objects. After excluding one of the
classes the percentage achieved 96%.

Figure 6. Program Circle Processing
Real conditions.
Images of marine surface, taken from
the air, were processed using inverse resonance filter[10].
Filter indicated the regions with possible objects (whales). The regions are of
two types – with an object and without an object (noise). An example is illustrated
on fig. 7.

![]()
a)object b)noise
Figure 7. Regions,
selected by the filter as considered having objects inside
The result of the classifier on distinguishing noise
images from useful images with objects was close to 100%.
Conclusions
As a geometrical figure circle gives a spatial
invariance for
flat objects: scaling and rotation independence. During the experiment a high
fast-acting and high probability of correct classification was achieved. In
future it is planned to prolong work with this method for perfection of his robustness
to the presence of the noise on the processed image and its accuracy.
References
. S. C. Zhu. Stochastic
Jump-Diffusion process for computing Medial Axes in Markov Random Fields/
S. C. Zhu // IEEE Trans. on PAMI. - Vol. 21, No.11. – 1999. – P. 1158-1169.
2. Mikolajczyk K. Shape recognition
with edge-based features/ Mikolajczyk K., A. Zisserman, C. Schmid// Proceedings
of the British Machine Vision Conference. – 2003.
3. Agarwal S. Learning a sparse
representation for object detection/S. Agarwal, D. Roth// In Proc. ECCV. -
Vol.4. - 2002. - P.113–130.
4. Amores J. Fast spatial pattern
discovery integrating boosting with constellations of contextual descriptors/J.
Amores, N. Sebe, and P. Radeva// In Proc. CVPR. - Vol.2.- 2005. - P.769–774.
5. Bouchard G. Hierarchical
part-based visual object categroization/ G. Bouchard B. Triggs// In Proc. CVPR.
- 2005. - P.710–715.
6. Grauman K. Pyramid match
kernels: Discriminative classification with sets of image features/ Grauman K.,
Darrell T. // Computer Science and Artificial Intelligence Laboratory Technical
Report. – 2005. – P. 1-12.
7. Fei-Fei L. One-shot learning of
object categories/ L. Fei-Fei, R. Fergus, and P. Perona //Transactions on
Pattern Analysis and Machine Intelligence. – 2006 – V.28. – P. 594 – 611.
8. R. Fergus. Object class
recognition by unsupervised scale-invariant learning/ R. Fergus, P. Perona, and
A. Zisserman // In Proc. CVPR. – 2003 – v.2, P. 264–271.
9. Распознавание образов / Письменный Николай// 2007.
– Режим доступу: http://www.nbugov.ua/articles/2003/03klinko.htm.
10. Буняк Ю.А. Гармонический анализ
волновых полей // Изв. РАН. Радиотехника
и электроника. – 1998. - Т.43. - №3. – C.261-265.