Ершова Н.М.
Приднепровская государственная академия
строительства
и архитектуры
РЕШЕНИЕ ЗАДАЧ КОММИВОЯЖЕРА
И ОПРЕДЕЛЕНИЯ КРАТЧАЙШИХ РАССТОЯНИЙ
МЕТОДОМ ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
Задача коммивояжера (бродячего торговца) заключается в
следующем. Имеется несколько пунктов на местности. Требуется найти кратчайший
путь их объезда, начиная с некоторого пункта. При этом необходимо объехать все
пункты и вернуться в начальный пункт, побывав на каждом пункте только один раз.
При полевых работах подобная задача встречается часто и в разных ситуациях: при
обследовании объектов и пунктов триангуляции, при рекогносцировке, при
выборочном дешифрировании и пр. [1]. Пункты, в которых надо побывать, всегда
известны. Уменьшение пути обхода намеченных пунктов экономит время, снижает
транспортные расходы и др.
Существует более ста методов решения задачи коммивояжера,
в работе [2] задача решена методом ветвей и границ, в работе [5] – методом
ближайшего соседа, который, по мнению авторов, наиболее прост. В этой работе
отмечено, что методом динамического программирования можно решить задачу с
менее 17 пунктами обхода. Это связано с тем, что авторы сами усложнили метод динамического
программирования.
Покажем эффективность метода динамического
программирования на примере сети дорог, изображенной на рис. 1[1].
В задаче коммивояжера требуется
определить две оптимальные траектории, которые соответствуют кратчайшим
расстояниям между пунктами ![]() при движении от
первого пункта ко второму и обратно. При этом следует учесть, что посетить
нужно все пункты и только один раз. В качестве целевой функции выступает
минимум расстояния между пунктами
при движении от
первого пункта ко второму и обратно. При этом следует учесть, что посетить
нужно все пункты и только один раз. В качестве целевой функции выступает
минимум расстояния между пунктами ![]() и
и ![]() . На сети дорог нанесены расстояния между отдельными пунктами
в километрах.
. На сети дорог нанесены расстояния между отдельными пунктами
в километрах.
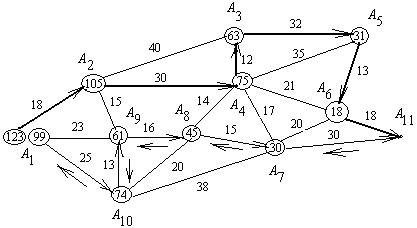
Рис. 1. Сеть автомобильных дорог
Разработка
модели. Весь процесс движения от
пункта ![]() к пункту
к пункту ![]() и обратно можно
рассматривать как многошаговый. Каждый шаг представляет собой перемещение из
одного пункта сети в другой. Так как пунктов 11, то и шагов 11. Задача состоит
в принятии решения на каждом шаге: выбор направления движения из данного пункта
в следующий пункт.
и обратно можно
рассматривать как многошаговый. Каждый шаг представляет собой перемещение из
одного пункта сети в другой. Так как пунктов 11, то и шагов 11. Задача состоит
в принятии решения на каждом шаге: выбор направления движения из данного пункта
в следующий пункт.
Состояние системы характеризуется одним параметром –
движение из одного пункта в другой. Процесс является одномерным и легко
изображается на плоскости. Пересечение дорог на каждом из шагов соответствует
одному из возможных состояний системы (коммивояжера).
Суть выбора оптимальной траектории заключается в
следующем. Последний шаг условно спланирован. Действительно, в каком бы из
возможных пунктов (![]() или
или ![]() ) перед пунктом
) перед пунктом ![]() ни оказался
коммивояжер, известно, какое решение следует принять. Задачу решаем с конца,
т.е. определяем возможные направления движения из пункта
ни оказался
коммивояжер, известно, какое решение следует принять. Задачу решаем с конца,
т.е. определяем возможные направления движения из пункта ![]() к пункту
к пункту ![]() (отмечены стрелками)
и отсекаем невозможные направления движения. В кружках на сети указывается
значение критерия оптимальности с нарастающим итогом, причем в случае нескольких
возможных путей в кружке указывается минимальное значение. Например, попасть в
пункт
(отмечены стрелками)
и отсекаем невозможные направления движения. В кружках на сети указывается
значение критерия оптимальности с нарастающим итогом, причем в случае нескольких
возможных путей в кружке указывается минимальное значение. Например, попасть в
пункт ![]() можно из пунктов
можно из пунктов ![]() ,
, ![]() и
и ![]() , но кратчайшее расстояние от этих пунктов к пункту
, но кратчайшее расстояние от этих пунктов к пункту ![]() будет из пункта
будет из пункта ![]() - 31 км. Тогда как
расстояние из пункта
- 31 км. Тогда как
расстояние из пункта ![]() равно 39 км, а из
пункта
равно 39 км, а из
пункта ![]() - 38 км. На сети
дорог возле пункта
- 38 км. На сети
дорог возле пункта ![]() изображены два
кружка, в которых записаны значения кратчайших расстояний при движении по
оптимальным траекториям. Оптимальная траектория при движении от пункта
изображены два
кружка, в которых записаны значения кратчайших расстояний при движении по
оптимальным траекториям. Оптимальная траектория при движении от пункта ![]() к пункту
к пункту ![]() отмечена жирной стрелкой,
а в обратном направлении – дополнительной стрелкой.
отмечена жирной стрелкой,
а в обратном направлении – дополнительной стрелкой.
Анализ
оптимальной траектории. В
соответствии с оптимальной траекторией коммивояжер должен посещать пункты в
следующей последовательности: ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . При этом ему придется проехать 222 км.
. При этом ему придется проехать 222 км.
Для той же сети дорог определим кратчайшие расстояния
из пункта ![]() во все остальные.
Такая задача часто возникает при выполнении полевых топографо-геодезических работ,
когда надо переехать с одного участка работ на другой. На первом этапе
определяем кратчайшее расстояние между пунктами
во все остальные.
Такая задача часто возникает при выполнении полевых топографо-геодезических работ,
когда надо переехать с одного участка работ на другой. На первом этапе
определяем кратчайшее расстояние между пунктами ![]() и
и ![]() , задачу решаем с конца, расстояние равно 84 км (рис. 2).
, задачу решаем с конца, расстояние равно 84 км (рис. 2).
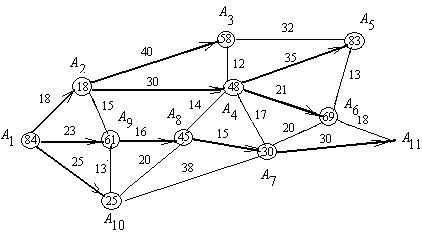
Рис.2. Кратчайшие пути от пункта ![]() до всех остальных
пунктов
до всех остальных
пунктов
Расстояния во все остальные
пункты, не лежащие на пути ![]() -
-![]() , начинаем определять от пункта
, начинаем определять от пункта ![]() . Значения кратчайших расстояний записаны в кружках у
соответствующих пунктов. Кратчайшие пути отмечены жирными стрелками.
. Значения кратчайших расстояний записаны в кружках у
соответствующих пунктов. Кратчайшие пути отмечены жирными стрелками.
В работе [6] задача о
кратчайшем пути решалась на модели транспортной задачи.
Таким образом, методом динамического программирования
можно довольно просто решать задачи выбора оптимальных схем транспортных перевозок,
радиорелейных и телевизионных сетей, мелиорационных и ирригационных систем
любой сложности.
Литература:
1. Брыкин П.А. Математическое программирование в
планировании геодезических и топографических работ / П.А. Брыкин, С.А.
Киммельман. – М.: Недра, 1972. – 232 с.
2.
Грешилов А.А. Как
принять наилучшее решение в реальных условиях / А.А. Грешилов. – М.: Радио и
связь, 1991. – 320 с.
3. Ершова Н.М. Математические методы и модели: Конспект
лекций / Н.М.Ершова.
– Днепропетровск: ПГАСА, 2009. – *112 с.
4. Ершова Н.М. Экономико-математическое моделирование:
Конспект лекций / Н.М. Ершова. – Днепропетровск: ПГАСА, 2008. – 248 с.
5.
Кузнецов А.В. Высшая
математика. Математическое программирование: Учебник для вузов / А.В. Кузнецов,
В.А. Сакович, Н.И. Холод. – Минск: Вышэйшая школа, 1994. – 286 с.
6.
Фролькис В.А. Введение в
теорию и методы оптимизации для экономистов. 2-е изд. / В.А. Фролькис. – Спб:
Питер, 2002. – 320 с.