ОПРЕДЕЛЕНИЕ
УСИЛИИ ЗАХВАТНОГО УСТРОЙСТВА КОЛЕСОСЪЕМНИКА
К.т.н. Жуманов
М.А.,студент Кожамкулова С.С
Казахский национальный технический университет
им.К.И.Сатпаева
г.Алматы
Захватное
устройство колесосъемника большегрузных автосамосвалов состоит
(рис.1) из рамы 1
гидроцилиндров 2 выдвижения рук 3
и рабочего органа
захвата 4.
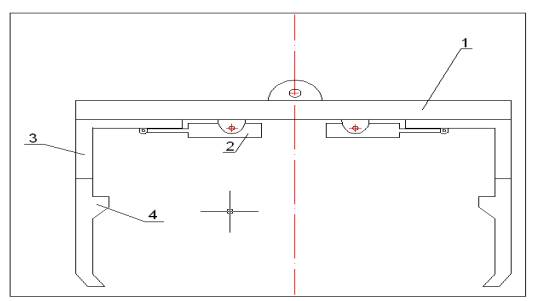
Рисунок 1. Cхема захватного
устройства
При конструировании захватных устройств необходимо учитывать конкретный тип объекта,
их форму, материал. Важные критерии при этом – необходима точность удержания
объекта и допустимое усилие на губках.
Усилие контактирования между
колесом и губкой определяется по формуле
![]() (1)
(1)
где i, j = 1,2; i![]() j,
j,
Рисунок 2. Расчетная схема захвата
Т.к.
рассчитываемый захват симметричный, рассмотрим схему нагрузки одной из губок .
Рассчитываем усилие контактирования между объектом и губкой.
Объектом манипулирования будет колесо массой m = 4000кг.
Реакция
на одну губку захвата.
![]()
где g – ускорение свободного падения.
Усиление
контактирования между деталью и губкой определим по формуле (1.1).
При ![]() получим:
получим:
![]()
Коэффициент
трения для пары сталь – резина 0,2.
Усилие
зажима на губке схвата равно:
![]()
Усилие
привода захватного механизма получим:
![]() или
или ![]()
Задавшись
соотношением ![]() коэффициентом запаса
коэффициентом запаса ![]() и коэффициентом
полезного действия механизма 0,9
найдем:
и коэффициентом
полезного действия механизма 0,9
найдем:
![]()
Таким
образом усилие привода должно быть F=255 кH. При
номинальном давлении 16 МПа в поршневой полости гидроцилиндра диаметром поршня
равным 50 мм, возникает усилие на штоке величиной 314 кН .
Рисунок 3. График зависимости усилий
захвата от диаметра
колес автомобилей.
Как
видно из рисунка 3 с увеличением
диаметра колес величина усилий захватного механизма равномерно возрастает,
резкого скачка не наблюдается.
Рисунок 4. График зависимости усилий
захвата P от массы
m колес автомобиля
Как показывает график зависимости усилий от массы колес
(рис.4) при массе от 1000 до 2100 кг кривая равномерно увеличивается
сответственно в интервале усилий 10,5 – 14,5 кН, а с увеличением массы от 2200
до 4000 кг кривая резко скачкообразно возрастает, потребую усилий захвата от
15,2 до 16,7 кН.
Список литературы
1.Бурдаков С.Ф.и.др
Проектирование манипуляторов промышленных роботов и роботизированных
комплексов: Учеб.пособие.М : Высш.шк, 1986, – 264 с.
2.Козырев Ю.Г.
Захватные устройства и инструменты промышленных роботов: Учеб.пособие/ Ю.Г.
Козырев. – М.: КНОРУС. 2010