Технические науки / 4. Транспорт
Неженцев
А.Б., Аветисян С.М., Косоногова Л.Г.,
Орлов С.А.
Восточноукраинский
национальный университет им. В. Даля
Моделирование
переходных процессов при
опускании грузов кранами мостового типа
Вследствие повышения интенсификации
погрузочно-разгрузочных работ и рабочих скоростей крановых механизмов остро
стоит проблема снижения динамических нагрузок в канатах и металлоконструкциях
грузоподъемных кранов, а также плавной «посадки» грузов и их точного
позиционирования. Поскольку одним из наиболее эффективных путей осуществления
плавного и точного опускания груза является применение динамического
торможения, то в панелях управления силовыми и магнитными контроллерами
механизмов подъема устанавливают устройства, реализующие указанный вид
торможения двигателем (например, контроллеры ККТ65А, ККТ69А, ТСД) [1].
Вместе с тем, не
смотря на очевидные преимущества динамического торможения при опускании грузов
и выпускаемые промышленностью панели управления, этот режим торможения используется
редко. Одной из причин является необоснованный (иногда - неприемлемый) выбор
механических характеристик в режиме динамического торможения, что может
привести к значительному увеличению времени опускания груза, или не даст снизить
динамические нагрузки. Отсутствие обоснованных рекомендаций не только существенно
снижает эффект от применения динамического торможения, но и может дискредитировать
прогрессивный вид торможения при неумелом использовании.
Поскольку публикаций, касающихся переходных процессов при опускании груза и
в частности – в режиме динамического торможения практически нет, то в данной
работе предлагается математическая модель и результаты исследований влияния
различных факторов на динамические нагрузки при опускании груза мостовым краном
в режиме динамического торможения.
Процесс опускания
груза состоит из нескольких этапов, а переходные процессы при опускании груза
краном мостового типа, представленного трехмассовой динамической моделью (см.
рис. 1), описываются следующими системами дифференциальных уравнений:
- на первом этапе (опускание груза при работе двигателя в режиме силового
спуска, рис. 1б), а также - на втором этапе (опускание груза при работе двигателя
в генераторном режиме, рис. 1в)
 (1)
(1)
- на третьем этапе (опускание груза при работе двигателя в режиме динамического
торможения до момента касания грузом основания, рис. 1в)
 (2)
(2)
- на четвертом этапе (после того как груз коснулся основания, происходит
ослабление канатов, рис. 1г)
![]() (3)
(3)
При этом начальные
условия являются ненулевыми и определяются по следующим выражениям:
![]() (4)
(4)
Приведенная к канатам
сила привода РД определяется по формулам:
- в двигательном и
генераторном режимах при опускании груза
![]() ; (5)
; (5)
- в режиме
динамического торможения
![]() , (6)
, (6)
где mП, mМ, mГ –
приведенные массы, соответственно, вращающихся частей привода подъема, средних
частей моста и порожней тележки, груза; yП, yМ, yГ – пути,
проходимые, соответствующими массами от начала координат; СМ и СК
– коэффициенты жесткости металлоконструкции крана и канатов; DM и DK –
коэффициенты демпфирования колебаний металлоконструкции крана и канатов; PД –
приведенная к канатам сила двигателя; ![]() ;
; ![]() - постоянные для j-ой искусственной характеристики двигателя;
- постоянные для j-ой искусственной характеристики двигателя;
![]() - критический момент
двигателя;
- критический момент
двигателя; ![]() - критическое скольжение на j-ой механической характеристике;
- критическое скольжение на j-ой механической характеристике; ![]() - скорости подъема груза, соответствующие синхронной и текущей
частотам вращения ротора двигателя;
- скорости подъема груза, соответствующие синхронной и текущей
частотам вращения ротора двигателя; ![]() - передаточное число привода;
- передаточное число привода; ![]() - радиус барабана;
- радиус барабана; ![]() - КПД механизма подъема.
- КПД механизма подъема.
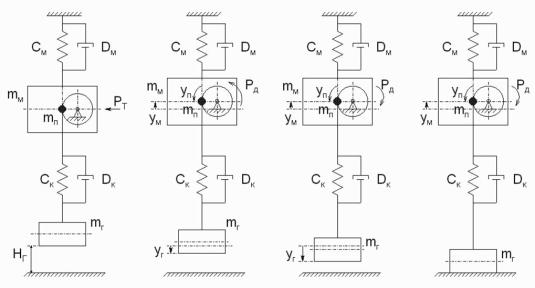
а) б) в) г)
Рис. 1. Трехмассовая модель
мостового крана при опускании груза
Для интегрирования систем нелинейных
дифференциальных уравнений (1, 2, 3)
совместно с выражениями (4, 5, 6)
численным методом разработана многофункциональная компьютерная программа [2],
позволяющая с высокой точностью рассчитывать значения и строить графики
изменения перемещений, скоростей и ускорений приведенных масс, нагрузок в
металлоконструкции и канатах при опускании грузов в различных режимах.
На примере мостового крана
грузоподъемностью 20/5т и пролетом 28,5м было исследовано множество переходных
процессов при опускании грузов. В результате их обработки построены графики
(см. рис. 2-4). На рис. 2 приведены графики зависимости времени опускания
номинального груза от высоты и механических характеристик электропривода в режиме
динамического торможения мостовым краном г/п 20/5т.
Рис. 2. Графики зависимости
времени опускания номинального груза
от высоты и механических характеристик в режиме динамического
торможения мостовым краном г/п 20/5т
На рис. 3 приведены графики зависимости коэффициента
динамичности металлоконструкции, а на рис. 4 - коэффициента динамичности в
канатах мостового крана г/п 20/5т от высоты и механических характеристик электропривода
при опускании номинального груза в режиме динамического торможения.
Анализ результатов исследований при опускании груза показал,
что в отличие от подъема «с подхватом» коэффициенты динамичности нагрузок в канатах
Кк и металлоконструкции крана Км зависят от высоты
опускания. Они уменьшаются до 9% при увеличении высоты опускания до 8м. Наименьшие
коэффициенты динамичности Кк и Км были получены при
опускании по первой механической характеристике, наибольшие – по третьей. Отметим,
что самым быстрым спуск груза был на первой механической характеристике, а
наиболее медленным – на пятой.
Таким образом, разработанные математическая модель мостового
крана и программное обеспечение позволяют с высокой точностью рассчитывать нагрузки в металлоконструкции и канатах,
перемещения, скорости и ускорения элементов крана и груза при его опускании в
различных режимах.
Рис. 3. Графики зависимости
Км от высоты и механических характеристик
при опускании номинального груза в режиме динамического торможения
Рис. 4. Графики зависимости
Кк от высоты и механических характеристик
при опускании номинального груза в режиме динамического торможения
Литература
1. Яуре А.Г., Певзнер Е.М. Крановый электропривод:
Справочник.- М.: Энергоатомиздат,1988.- 344 с.
2. Аветисян С.М., Неженцев А.Б. Программное обеспечение для исследования переходных процессов грузоподъемных
кранов (часть 2: при работе механизмов подъема грузов // Підйомно-транспортна
техніка, № 1(9). - Дніпропетровськ, 2004. – с. 83-95.