Технические науки/ 12. Автоматизированные
системы управления на производстве
Гулина И.Г.
ГВУЗ «Национальный горный
университет», Украина
Моделирование САУ
тепловым состоянием доменной печи
Одним из наиболее объективных методов
оценки теплового состояния (ТС) доменной печи (ДП) является контроль циклов
«накопление-выпуск» жидких продуктов плавки, которые характеризуются изменением
уровня расплава (УР).
Предпочтительным для САУ ТС ДП представляется
реализация принципа беспоискового непрямого адаптивного управления [1],
поскольку при этом основной контур разомкнут, что обуславливает асимптотическую
устойчивость САУ. В таких САУ предварительно производится идентификация объекта
управления (ОУ), а затем, зная параметры ОУ, вычисляются коэффициенты регулятора.
Поскольку ТС ДП имеет значительные запаздывания
по каналам управления, то для их компенсации используются прогнозирующие модели
ОУ, реализуемые с помощью адаптивных фильтров-аппроксиматоров (АФА).
САУ ТС ДП
состоит из двух локальных подсистем (контуров), реализующих управление сверху
(режимом загрузки) и снизу (режимом дутья).
Адаптивные
САУ ТС ДП должны строиться как оптимальные в смысле качества управления, что, в
основном, выражается в точности воспроизведения задающих воздействий по
требуемому значению тренда УР, что соответствует стабилизации качества чугуна
на выпуске. При реализации таких САУ
могут использоваться регуляторы различных типов – как самонастраивающиеся, так
и стандартные (ПИ, ПИД и др.) [1].
Оценка качества адаптивной САУ выполнялась
на основе экспериментальных данных, полученных в условиях ДП-3
металлургического комбината им. Ильича, путем моделирования с использованием разработанных
программ в среде Matlab.
Из особенностей ОУ глубина прогноза по каналам
управления сверху принята 10 тактам (3,5 часа), а по каналу управления снизу –
3 такта (1 час). При этом, глубина памяти в соответствии с выше полученными
результатами принята равной 4 тактам.
Для прогнозирования состояния ОУ использовался
нейросетевой АФА с каскадной сетью прямого распространения с 64 нейронами в скрытом слое
с сигмоидальными функциями активации и 1
линейным нейроном в выходном слое, а количество циклов обучения ограничивалось
300.
Моделировалась робота адаптивной САУ с
самонастраивающимся регулятором и прогнозирующей моделью. При этом, для решения
оптимизационной задачи поиска оптимальных по точности управляющих воздействий
использовался метод золотого сечения.
В качестве меры точности прогнозирования и управления
использовались относительные среднеквадратические ошибки.
Результаты управления ОУ (рис. 1) включают значение
тренда УР в неуправляемом (Plant
nContr) и управляемом (Plant wContr) режимах,
выходы АФА контуров управления сверху (AFA top out) и снизу (AFA bot out), а также изменения управляющих воздействий сверху (Control top) и
снизу (Control bot).
Анализ полученных результатов показывает,
что снижение среднеквадратического отклонения тренда УР от заданного значения
(ошибка управления) в управляемом режиме относительно неуправляемого составляет
в 1,59 раз. Статистическая проверка по критерию знаков подтвердила значимость
полученных выводов.
В целом ошибки управления определяются
ошибками прогнозирования. Предобучение АФА улучшает сходимость алгоритмов
адаптации и, соответственно, обеспечивает снижение ошибки управления.
Время, такт![]()
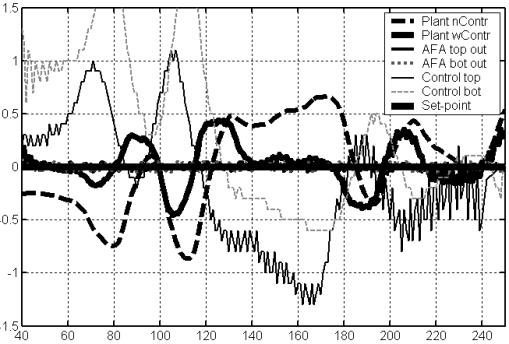
Рис. 1. Результаты управления ТС ДП по
тренду УР
Время синтеза управления на один такт прогноза
при вычислении на процессоре Pentium IV составляет около 1,1 с, что не вносит
временных ограничений на применение этих систем в контурах управления ТС ДП.
Выводы
Установлено, что использование адаптивной
САУ ТС ДП позволяет снизить среднеквадратическую ошибку управления в 1,59 раз.
При этом, затраты на синтез управления не вносят временных ограничений на
применение этих систем в контурах управления ТС ДП.
Литература:
1.
Гулина И.Г.
Адаптивная САУ сложным многосвязным объектом управления с интеллектуальным прогнозированием
/ И.Г. Гулина, В.И. Корниенко // Системы обработки информации. – 2011. – №
8(98). – С. 57-62.