УДК 620.192.46
Черніков М.В., студент;
(Донецький національній технічний університет, м.
Донецьк, Україна)
МОДЕЛЮВАННЯ РОБОТИ ТЕЧОШУКАЧА НА
ДІАГНОСТИЧНІЙ МОДЕЛІ ТРУБОПРОВОДУ В MATLAB
Під час
роботи нафтових заводів, багато його требопроводів знаходяться під тиском. У
таких умовах експлуатації завжди є ризик виникнення дефектів, які можуть
призвести до аварійних ситуацій. Наприклад, дефекти зварних з’єднань, як
тріщини, непровари чи пори, можуть призвести як до витоку повітря чи води у
найкращому випадку, так і до витоку газу, розриву паропроводу, чи навіть вибуху
у найгіршому випадку.
Проблеми,
пов'язані із забезпеченням контролю якості, стають особливо актуальними в
умовах сучасної економіки, коли на перше місце починає виходити надійність
устаткування і безпека працюючого персоналу. Для завчасного запобігання
аварійних ситуацій необхідний регулярний технічний контроль складових частин
парового котла. Підвищити рівень якості технічного обслуговування цехів
нафтових заводів можна за рахунок моделювання роботи пристрою технічного
контролю на ділянках трубопроводу з характеристиками близькими до реальних .
Мета роботи:
підвищення достовірності технічної діагностики котлового обладнання за моделювання
роботи пристрою технічного контролю та аналізу отриманих даних. Завданнями
роботи є: вибір методу технічного контролю; моделювання діагностичної моделі
трубопроводу; вибір параметрів системи; рекомендації щодо використання пристрою.
Найбільш доцільно
використовувати методи неруйнівного контролю основних робочих властивостей і
параметрів об'єкту або окремих його елементів/вузлів, що не вимагає виведення
об'єкту з роботи або його демонтажу [1]. З даного класу методів найбільш
поширеними та ефективними є методи акустичного контролю (АК). Це обумовлене
наступними перевагами: акустичне дослідження не руйнує і не ушкоджує
досліджуваний зразок, що є його головною перевагою. Крім того, можна виділити
високу швидкість дослідження при низькій вартості і небезпеці для людини (в
порівнянні з рентгенівською дефектоскопією) і високу мобільність устаткування. Для
роботи був обраний методи акустичної емісії
[2].
Для
порівняння отриманих сигналів найбільш підходить взаємокореляційна функція тому
що постає задача виділити один сигнал з двох різних каналів зв’язку. Взаємокореляційна функція (ВКФ) різних
сигналів (cross - correlation function, CCF) описує як міру схожості форми двох
сигналів, так і їх взаємне розташування один відносно одного по координаті
(незалежній змінній). Узагальнюючи формулу автокореляційної функції на два різні
сигнали s(t) і u(t), отримуємо
наступний скалярний добуток сигналів [3]:
 . (1)
. (1)
Математичні
моделі розповсюдження хвиль вдало представлені в ряді відомих робіт [4-5]. Вони
також показують, що між реальними фізичними процесами та спрощеною моделлю, що
враховує вдале застосування кореляційного
аналізу, дійсно існує значний розрив. Це призводить до вагомих недоліків
у отриманні при застосуваннях систем діагностики. Враховуюче це, розвиток
систем технічної діагностики йде шляхом поступового уточнення та ускладнення
математичної моделі акустичного середовища досліджень та відповідним їм
алгоритмам роботи пристроїв.
Практичне
застосування кореляційного методу призводить до необхідності врахування
відмінностей реальної ділянки, що діагностується, від її ідеальної моделі,
наприклад, у виді, що приведений на рис. 1. Символом Hi(t) позначена дія
лінійної фільтрації.
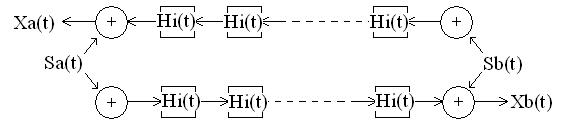
Рисунок 1 – Модель
трубопроводу, що діагностується, з врахуванням частотної залежності параметрів
каналу розповсюдження акустичних імпульсів
Вважаючи, що
по трубопроводу, виготовленому із сталі марки 17Г1С [6], зі швидкістю 2м/с
перекачується нафта, маємо коефіцієнти загасання для першої нормальної моди:
0.015; 1.11·10^-4; 2.25·10^-5; 2.53·10^-6 (для частот 0.2 кГц, 10 кГц, 20 кГц,
40 кГц відповідно)[6]. Блоки Hi(t) (рис 3), були реалізовані у MatLab за
допомогою блоків Transport Delay та Analog Filter Design. Аналогові фільтри
були налаштовані в урахуванням вищезгаданих коефіцієнтів. Коефіцієнти затримки
сигналу у блоках Transport Delay Були розраховані зі швидкості розповсюдження
сигналу акустичної емісії в нафті. Шуми
Sa(t) та Sb(t) були реалізовані
за допомогою блоків Random Number, що генерують білий шум. Імпульс акустичної
емісії був реалізований у MatLab за допомогою блоків Pulse Generator та Analog
Filter Design.
Для
моделювання технічної діагностики ділянки трубопроводу, на основі схеми, що
була надана на рисунку 1, у MatLab Simulink була розроблена схема досліджень, що надана на рис. 2.
На
схемі бачимо: модель імпульсу акустичної емісії; два канали розповсюдження
сигналу, що імітують трубопровід, завади, що подаються на границі ділянки,
фільтри Бесселя, що були налаштовані по спектру акустичної емісії, для
покращення отриманого сигналу, та засоби збереження та відображення сигналу.
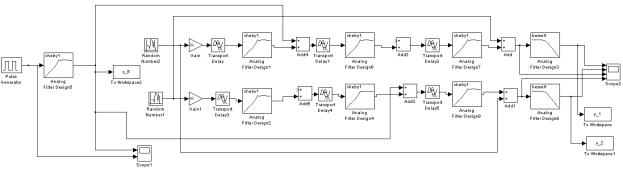
Рисунок
2 –Схема досліджень для ділянки трубопроводу у MatLab
На основі
даних про тип трубопроводу та швидкості розповсюдження акустичного сигналу у
нафті, з урахуванням налаштувань блоків, що моделюють сегменти трубопроводу,
були розраховані дані, що були внесені в відповідні блоки Transport Delay (0.0177, 0.0154, 0.0149 c та 0.0149, 0.0154, 0.0177 с
відповідно). На рисунку 3 зображені результати моделювання, де час моделювання
1с, частота дискретизації 0.00001с.
Перші два
графіки – надходження імпульсу акустичної емісії на сенсори при наявності
фільтру Бесселя, третій та четвертий графіки – канали зв’язку без фільтрів. Маємо
змогу наочно впевнитись у доцільності використання даних фільтрів. Після
отримання результатів, програма, написана у MatLab, розраховує ВКФ сигналів та виводить координати піку по
осі часу.
Трубопровід,
що моделюється, розділений на три сегменти, зі своїми характеристиками та
часовими затримками. Умовний акустичний імпульс надходить до одного сенсори
через два сегменти, до іншого через один:
![]() , (2)
, (2)
де: ![]() - час піку ВКФ;
- час піку ВКФ;
![]()
![]()
![]() - час затримки
сигналу у відповідних сегментах трубопроводу.
- час затримки
сигналу у відповідних сегментах трубопроводу.
Для нашого
випадку:
![]() (3)
(3)
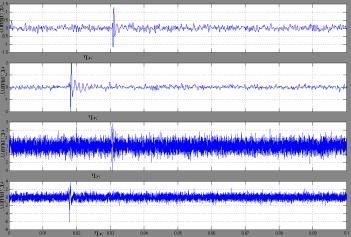
Рисунок
3– Результати моделювання діагностування трубопроводу
На
усіх графіках помітні піки – сигнал, що надходить з деякою затримкою. На
підставі цих даних проводиться розрахунок ВКФ.
Графік ВКФ сигналів, що були
отримані по двох каналах зображений на рис. 4.
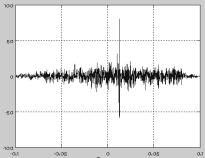
Рисунок
4 – ВКФ сигналів, отриманих з двох каналів
Час піку ВКФ
дорівнює 0.0126с, що співпадає з очікуваним. Щоб розрахувати дистанцію до
дефекту, потрібно цей час помножити на час розповсюдження акустичного сигналу в
нафті.
Практично
завжди в каналах зв'язку присутні завади. Часом дуже істотні, які не дозволяють
проводити аналіз на належному рівні. Тому в роботі також була знята залежність
похибки у локалізації джерела імпульсів від SNR в каналі зв'язку.
 [dB],
(4)
[dB],
(4)
де: Ps – потужність сигналу;
Pn
– потужність шуму.
Програми обчислюють похибку отриманого результату.
Залежність похибка - сигнал/шум була знята для двох випадків - з присутністю
фільтру в каналі зв'язку і без нього. Графіки залежностей приведені на рисунку 5
ліворуч та праворуч відповідно.
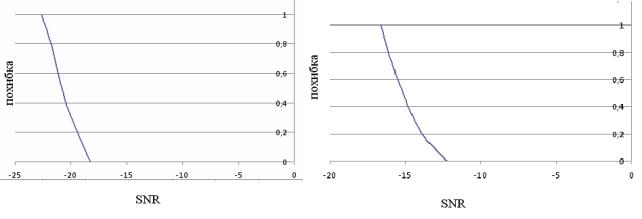
Рисунок
5 – Залежність похибки від SNR в каналах зв’язку
Бачимо,
що використання фільтру низьких частот дає змогу працювати з прибором при
відношенні Сигнал/Шум на 5-6 дБ нижче, що є дуже вагомою цифрою для прибору.
Виводи: у
зв'язку з вимогами безпеки працюючого персоналу і надiйностi устаткування, що
постійно підвищуються, проблеми технічного контролю якості стають особливо
актуальними. Найбільш ефективним методом контролю якості є неруйнівний
контроль, оскільки він не впливає на характеристики досліджуваного об'єкту. В
роботі проведене моделювання діагностичної ділянки трубопроводу, та моделювання
роботи пристрою технічного контролю.
Система реалізована
на даних принципах, може мати широке застосування в області технічного
діагностування трубопроводів на нафтових заводів за рахунок більш точних
результатів досліджень та роботі при більшому рівні внутрішнього та зовнішнього
завад, що даватиме можливість знаходити дефект на ранніх стадіях його розвитку.
Можливе використання систем комплексного технічного діагностування для інших подібних
об’єктів, що використовують водо- та
парамагістралі.
Перелік посилань
1. Технические средства
диагностирования: Справочник/В. В. Клюев, П. П. Пархоменко;
под общ. Ред. В. В. Клюева. — М.:Машиностроение,1989. — 672
с.
2. Неразрушающий контроль: справочник: В 7т. Под общ. ред.
В. В. Клюева. Т. 2: В 2 кн.-М.:Машиностроение, 2003.-688 с.
3. Відніс Р., Эноксон Л. Прикладний аналіз тимчасових рядів. -
М.: Світ, 1982. - 428с.
4. Гринченко В.Т., Комиссарова Г.Л. Свойства поверхностных
волн в упругом полом цилиндре // Акуст. вiсн. 2004. Т. 7. № 3. С. 39–48.
5. Гринченко В.Т., Комиссарова Г.Л. Особенности распространения
волн в заполненных жидкостью цилиндрах с податливыми стенками // Акуст. вiсн.
2001. Т. 4. № 3. С. 22–33.
6. Овчинников А.В. Особенности распространения сигналов
акустической эмиссии утечек в трубопроводах с жидкостью и аппаратура контроля
герметичности : дис. ... канд. техн. наук : 05.11.13 Томск, 2006 170 с. РГБ ОД,
61:07-5/377