Технические науки/6.
Электротехника и радиоэлектроника
Бегимадова
Т.Х., Гулина И.Г.
ГВУЗ:
«Национальный горный университет», Украина
Использование
адаптивных фильтров в виброакустической диагностике для повышения отношения
сигнал-шум
В различных
системах виброакустической диагностики часто возникает такая проблема, как
загрязнение полезного сигнала нежелательными сигналами или помехами. В качестве
источников данных нежелательных сигналов могут выступать приводы механизмов,
близко расположенные агрегаты и т.п., которые создают уровень помех, сильно
превышающий уровень полезного сигнала. В подобных ситуациях проблематично дать
правильную оценку полученным результатам и сделать адекватные выводы о
состоянии диагностируемого устройства или детали без использования
специализированных средств. Поэтому актуальным является вопрос о разработке и
внедрении новых методов и алгоритмов обработки виброакустических сигналов,
позволяющих повысить соотношение сигнал-помеха, что позволит улучшить
результаты виброакустической диагностики.
Существует два основных пути решения данной проблемы. Первый - заключается в
использовании обычных линейных фильтров. Однако данный подход может применяться
только в тех случаях, когда полезный сигнал и помеха занимают строго
определенные и разнесенные полосы частот и не дает желаемого результата. А
также, когда спектры сигнала и помех перекрываются, или когда полоса частот
помехи неизвестна или переменна. Все эти проблемы очень затрудняют
использование линейных фильтров и внедрение их в системы вибродиагностики.
Другим
способом решения этой проблемы является использование в системах
вибродиагностики адаптивных фильтров. Адаптивные фильтры в настоящее время
нашли применение во многих радиотехнических и телекоммуникационных системах.
Одним из наиболее частых применений адаптивной фильтрации является очистка
сигналов от шума. Однако адаптивные алгоритмы в силу наличия механизмов обратной
связи характеризуются повышенной
нестабильностью в некоторых
областях применения. Это обусловлено сложностью, а иногда и невозможностью их
математического описания и анализа.
Структура
адаптивного фильтра-шумоподавителя приведена на рис. 1.
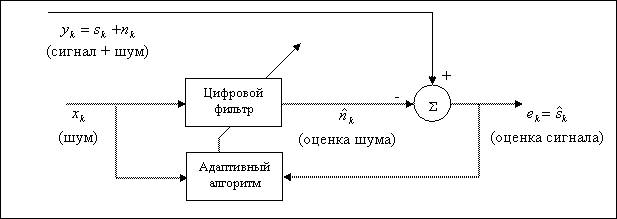
Рис. 1 Структура адаптивного фильтра-шумоподавителя
Адаптивный
фильтр состоит из двух частей: цифрового фильтра с регулируемыми коэффициентами
и адаптивного алгоритма, который используется для настройки или изменения
коэффициентов фильтра (рис. 1). В адаптивных алгоритмах сигнал ошибки екминимизируется
согласно некоторому критерию, например, по схеме наименьших квадратов.
Наибольшее распространение получили алгоритмы, в которых используются схема
наименьших квадратов (алгоритм LMS), рекурсивная схема наименьших квадратов
(алгоритм RLS) и алгоритм Калмана.
Схема
наименьших квадратов наиболее эффективна с точки зрения вычислительной
сложности и требований к памяти. Более того, для неё несущественна проблема
численной неустойчивости, присущая двум другим алгоритмам. А основным
достоинством алгоритма LMS является легкость реализации алгоритма и предельная
вычислительная простота – для подстройки коэффициентов фильтра на каждом шаге
нужно выполнить N+1 пар операций “умножение - сложение”. Однако этот метод
обладает медленной сходимостью и дает повышенную дисперсию ошибки в
установившемся режиме.
Достоинством алгоритма RLS является быстрая сходимость. Однако достигается это
за счет значительно более высокой, по сравнению с алгоритмом наименьших
квадратов, вычислительной сложности.
Алгоритм Калмана и алгоритм RLS являются близкими по качественным параметрам и
вычислительной сложности. Разница заключается в трактовке параметров алгоритмов
и исходных посылках, использовавшихся при выводе формул.
Таким
образом, в статье обоснована целесообразность применения адаптивных фильтров по сравнению с линейными
фильтрами, а также алгоритмов адаптивной фильтрации в системах
виброакустической диагностики для минимизации воздействия помех, т.е. для
увеличения соотношения сигнал-шум.
1. Скляр Б. Цифровая связь. Теоретические основы и
практические применения. – М.: Вильямс, 2003. – 1104 с.
2. Коуэн К. Ф. Н.
Адаптивные фильтры: пер. с англ. / Под ред. К. Ф. Н. Коуэна и П.М. Гранта. –
М.: Мир, 1988. – 320 с.
3.Сергиенко А.Б.
Цифровая обработка сигналов: учебник для вузов. – 2-е изд. – СПб.: Питер, 2006.
– 513 с.