Калініна М.Ф.
Національний технічний університет України «КПІ»
ЛОКАЛЬНИЙ АВТОКОНТРОЛЬ ПОПЛАВКОВИХ ГІРОСКОПІВ
Для
вирішення бойової задачі необхідно мінімум часу для готовності та оперативності
використання літального апарату, відповідно необхідна максимально можлива
економія часу для функціональної спроможності поплавкових гіроскопів перед
установкою боєкомплекту на літальному апараті (ЛА).
Тому
вирішення проблеми атестації працездатності приладів інерціальної навігації з
мінімальними затратами часу являється надзвичайно актуальним.
Перевірка
працездатності складових блоку приладів керування (БПК) здійснюється на
випробувальних стендах по вимогам технічних характеристик Паспортів на виріб.
Випробувальні стенди імітують різні режими, які відбуваються при льотній
експлуатації: проникаюче акустичне випромінювання, качка, вібрація та ін.
Обмежимось
перевіркою функціональної спроможності поплавкових гіроскопів (ПГ) та їх
сигнальних ланцюгів, вважаючи працездатними стабілізуючі двигуни та інші
складові, що містяться в БПК боєкомплекту. При чому перевірка виконується в
межах гарантійного терміну, що задається підприємством-виробником по вимогам технічного
Паспорту на виріб [1].
Локальна атестація – атестація працездатності поплавкового
гіроскопу, а саме його сигнальних ліній при відключеному живленні ротора по
реакції приладу на заданий примусовий кутовий рух поплавкового підвісу навколо
вихідної осі з відповідною реєстрацією цього руху датчиком кута.
Вибір способу локального
тестування (при відключеному живленні ротора гіроскопа) базується на особливій
властивості будови поплавкових приладів, а саме місцерозташуванні гіромотору.
Розглянемо дану особливість на
прикладі двухстепеневого поплавкового інтегруючого гіроскопу [2]. Як відомо, гіромотор знаходиться в комфортних
умовах: всередині поплавка в
герметичному корпусі , що заповнений рідиною. Таке розташування забезпечує
стабільний вихід його на робочий режим та захищає гіромотор від впливу
різноманітних збурюючих чинників, які діють на інші елементи підвісу гіроскопу.
Каменеві опори підвісу теж наднадійні, оскільки поплавок практично позбавлений
залишкової ваги, що зводить моменти сухого тертя в опорах до мінімального
значення [3].
ПГ
обладнаний кільцевими циліндричними проточками, які дистанційно розташовані на
циліндричній поверхні порожнини корпусу і мають спільну з нею вісь. Проточки надають стінкам корпусу та
прилеглому до них шару робочої рідини ступінчасто-змінні в поздовжньому
напрямку розміри (по товщині). Електричний перемикач одночасної зміни полярності
сталого електричного живлення контактів датчика моментів здійснює зміну напряму
обертального руху поплавка навколо своєї осі (рис. 1).
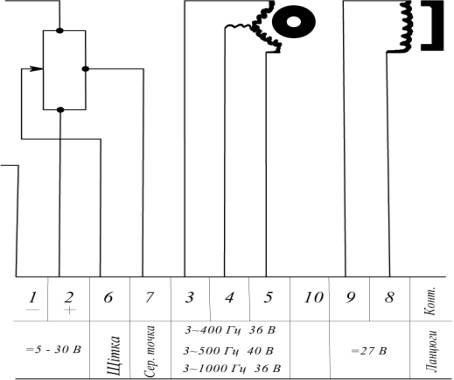
Рис.
1. Електрична схема датчика кутових швидкостей ДУСУ [1]
Локальна перевірка поплавкового гіроскопа відбувається
наступним чином: в неробочому режимі ротора гіроскопа зміна полярності сталого
електричного струму на контактах датчика моментів по сигналу атестуючої об'єкту. Структура цього сигналу
у вигляді quasi-гармонічного коливання поплавка буде еквівалентна
хитавиці корпусу апарата в натурних умовах. Поворот із сталою кутовою швидкістю
буде імітувати циркуляцію об'єкта.
Імітацію примусового (штучного) обертання поплавка здійснить
датчик моментів і поверне, "вправо" чи "вліво", залежно від полярності керуючого сигналу на обмотці
датчика моментів, поплавковий підвіс, наявність чого відразу буде зареєстровано
датчиком кута. Ці дії створять реалії натурних умов експлуатаційного режиму
літального апарату і визначать локальну функціональну спроможність гіроскопа.
Отже, комфортне розташування гіромотору із
струмопідводами забезпечує безвідмовну роботу системи живлення, а каменеві
опори підвісу наднадійні, оскільки поплавок практично позбавлений залишкової
ваги. Таким чином, умови його роботи, в порівнянні з умовами датчика кута і
датчика моментів, можна вважати сприятливими і дана спрощена структура локальної атестації
поплавкового гіроскопа є об'єктивною перевіркою працездатності приладу та
економить час на перевірку функціональної спроможності ПГ в складі БПК боєкомплекту
перед встановленням на літальному апараті.
Література:
1. Технический ПАСПОРТ на
датчик угловых скоростей унифицированный № 1021-8Г ДУСУ 2-3 ОА, 1968.
2.
Карачун
В. В., Мельник В. Н., Лозовик В. Г. Многомерные задачи упругости подвеса
поплавкового гироскопа // Космiчна наука i технологія, 2000. – Т. 6. – № 2/3. – С. 92-97.
3.
Мельник В.М. Зменшення впливу звукових полів на похибки поплавкового
гіроскопа // Вісник ЖІТІ. – 2002 . - №
4 / Технічні науки. C. 111-116.