*99587*
Кинематические схемы инерционных
бесступенчатых передач
Инерционные
бесступенчатые передачи являются автоматическими бесступенчатыми передачами
механического типа и отличаются целым рядом преимуществ: компактностью
конструкции, высоким коэффициентом полезного действия, широким диапазоном
трансформации момента и другими преимуществами [1]. Существует большое
разнообразие конструкций таких передач. Однако, несмотря на такое разнообразие,
практически все эти конструкции можно достаточно полно описать несколькими
обобщенными кинематическими схемами.
Наиболее
общую схему представляют инерционные передачи, содержащие импульсный механизм и
два механизма свободного хода (корпусной и выходной). Схема называется жесткой,
так как она не содержит специально введенных упругих звеньев и при составлении
ее математической модели упругости звеньев не учитываются. Жесткая схема
изображена на рис. 1. Она содержит ведущий вал 1, импульсный механизм 2,
промежуточный вал 3, на котором находятся корпусной 4 и выходной 5 механизмы
свободного хода, а также ведомый вал 6. Импульсный механизм имеет
неуравновешенные грузовые звенья. Его основное назначение ─ создавать
знакопеременные импульсы крутящего момента на промежуточном валу 3. Механизмы
свободного хода ─ устройства, передающие момент лишь в одном направлении.
Положительные импульсы крутящего момента через выходной механизм свободного
хода 5 передаются на ведомый вал 6, обратные импульсы через корпусной механизм
свободного хода 4 замыкаются на корпус.
Жесткая
схема позволила разработать предпосылки и основы теории инерционных
бесступенчатых передач. Оказалось, что,
несмотря на простоту конструкции, движение инерционных передач описывается
сложными системами существенно нелинейных дифференциальных уравнений.
Экспериментальные исследования передачи, выполненной по жесткой схеме,
подтвердили высокий КПД инерционных передач, широкий диапазон трансформации
момента и другие преимущества. Большинство дальнейших теоретических
исследований инерционных передач проведено по наиболее простой в теоретическом
отношении жесткой схемы. Обращение исследователей к жесткой схеме является
естественным, так как исследование сложных систем, как правило, начинается с
рассмотрения наиболее простых случаев.
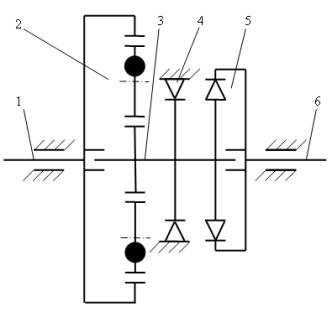
Рис. 1. Общая жесткая схема инерционной
бесступенчатой передачи
Частным
случаем жесткой схемы может служить инерционная передача, в которой обратные
импульсы через дополнительную шестеренчатую передачу так же, как и прямые
импульсы, передаются на ведомый вал. Такую передачу можно рассматривать как
инерционную передачу с двумя выходными механизмами свободного хода. К передаче
с двумя выходными механизмами свободного хода можно отнести и схемы с
раздельным использованием импульсов для привода различных рабочих органов.
Исследования жесткой схемы инерционной
бесступенчатой передачи показали, что при работе передачи возникают высокие
динамические нагрузки, обусловленные резким торможением промежуточного вала в
моменты включения корпусного и выходного механизмов свободного хода, что
приводит к низкой надежности и долговечности передачи. С целью снижения
динамических нагрузок была предложена и исследована [1] упругая схема
инерционной бесступенчатой передачи (рис. 2), содержащая ведущий вал 1,
импульсный механизм 2, промежуточный вал 3, корпусной 4 и выходной 5 механизмы
свободного хода с введенными упругими звеньями 7 и ведомый вал 6. Упругие
звенья 7 на этом рисунке показаны условно и характеризуют подпружинивание
механизмов свободного хода не в радиальном, а окружном направлении.
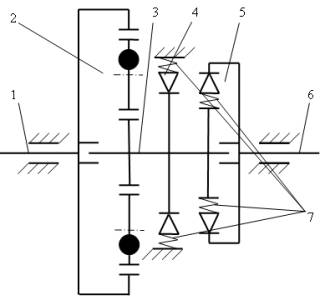
Рис. 2. Общая упругая схема инерционной бесступенчатой передачи
Упругая
схема позволила значительно расширить возможности передачи по обеспечению
заданных выходных характеристик, снизить динамическую напряженность инерционной
передачи и повысить ее надежность. Как
показали исследования, использование упругой схемы позволяет снизить
максимальные (в 1,5 ─ 2 раза) и средние нагрузки на механизмы свободного
хода, максимальные (в 2 ─ 3 раза) и средние нагрузки на импульсный
механизм, неравномерность вращения ведущего и ведомого валов, в 2 ─ 3
раза снизить массы грузовых звеньев импульсного механизма за счет накопления
потенциальной энергии при действии обратных импульсов крутящего момента и ее
использования при действии прямых импульсов.
Вместе с
тем, движение передачи, выполненной по упругой схеме, описывается гораздо более
сложными системами существенно нелинейных дифференциальных уравнений по
сравнению с жесткой схемой. Упругой схеме соответствуют большее число степеней
свободы, различные законы движения промежуточного и ведомого валов при
включенном выходном механизме свободного хода, движение промежуточного вала при
включенном корпусном механизме свободного хода, нелинейные колебания
промежуточного вала при стоповом режиме и другие особенности.
Несмотря
на снижение динамическое напряженности, упругая схема не привела к созданию
надежной и долговечной конструкции инерционной бесступенчатой передачи.
Основная причина этого заключается, по-прежнему, в достаточно высоких пиковых
нагрузках, действующих на элементы механизмов свободного хода, и высокой
частоте включений и выключений этих механизмов. Частичным решением проблемы
явилось создание схем и конструкций инерционных бесступенчатых передач лишь с
одним корпусным механизмом свободного хода.
Все эти
конструкции можно достаточно полно описать схемой, изображенной на рис. 3.
Здесь 1 ─ ведущий вал, 2 ─ импульсный механизм, 3 ─
промежуточный вал, который одновременно является ведомым валом, 4 ─
корпусной механизм свободного хода, 5 ─ рабочее звено.
В такой
схеме промежуточный вал совершает прерывистое одностороннее вращение. В
некоторых случаях такой вид движения является полезным для интенсификации
технологического процесса за счет вибрации, но в общем случае является
негативной стороной привода. Для снижения неравномерности вращения рабочего
звена промежуточный вал может быть выполненным упругим, например, торсионным,
как показано на рис. 3. Тем не менее, даже использование упругого
промежуточного вала не позволяет устранить главный недостаток такой схемы
─ значительную неравномерность движения ведомого вала. Рабочее звено в
такой схеме непосредственно связано с промежуточным валом, совершающим
прерывистое вращение, что принципиально не позволяет обеспечить достаточно
высокую равномерность вращения рабочего звена.
Более того, выполнение промежуточного вала упругим может в некоторых
случаях не только не снизить неравномерность вращения рабочего органа, но и
привести к вращению рабочего органа в противоположном направлении.
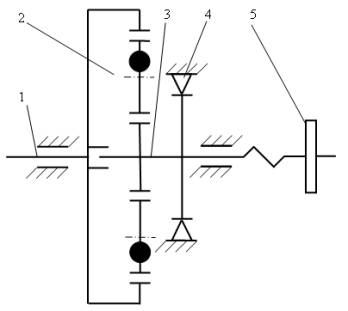
Рис. 3. Обобщенная схема инерционной передачи лишь с одним
корпусным механизмом свободного хода
Особый интерес представляют инерционные
передачи без механизмов свободного хода. Автором предложено семейство таких
инерционных передач [2]. Например, на рис. 4 представлена схема, которая
содержит импульсный механизм, включающий ведущее звено 1, неуравновешенные
грузовые звенья 2 и ведомое звено 3. На ведомом звене 3 импульсного механизма
установлен кривошипно-ползунный механизм, содержащий кривошип 4, шатун 5,
ползун 6. Ползун 6 связан с рабочим органом (на рисунке не показан) и может
быть подпружинен с помощью упругого звена 7. Возможны и другие варианты выполнения
инерционных передач, в которых вместо кривошипно-ползунного механизма может
быть использован шарнирно-рычажный механизм другого типа. Возвратно-поступательное
движение выходного звена рычажного механизма не является необходимым. В
конструкциях инерционных передач могут быть использованы и рычажные механизмы,
выходные звенья которых совершают другие виды движений. Кроме того,
предложенное семейство передач может быть расширено за счет использования
пространственных рычажных и кулачковых механизмов.
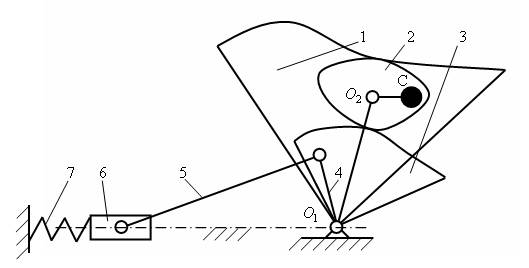
Рис. 4.
Кинематическая схема инерционной передачи
с рычажным механизмом
Эта схеме
соответствует, например, инерционный привод лобзикового станка. По этой схеме
может быть выполнен инерционный привод долбежного, протяжного, прошивочного и
других станков.
Рассмотренные
кинематические схемы инерционных приводов являются перспективными для создания
высокопроизводительных машин и механизмов и позволяют эффективно использовать
мощность приводного двигателя.
Литература:
1. Леонов А.И.
Инерционные автоматические трансформаторы вращающего момента. М.:
Машиностроение, 1978. 224 с.
2.
Алюков С.В. Динамика инерционного трансформатора вращающего момента без
механизмов свободного хода: Автореф. дис. …канд. техн. наук, ВПИ, 1983.