Д.т.н., проф. Лопатин
Б.А., к.т.н.,
доц. Плотникова
С.В.
филиал
ГОУ ВПО «Южно-Уральский
государственный
университет
(НИУ)
в г.
Златоусте,
Россия
О
преимуществах
эвольвентных
цилиндро-конических
зубчатых
передач
При
проектировании
современных
механических
приводов
удачные технические
решения
можно
получить за
счет
использования
в них
нетрадиционных
зубчатых
передач, к
которым
можно отнести
цилиндро-конические
зубчатые
передачи [1, 2]. В
цилиндро-конической
передаче
(ЦКП) одно из
зубчатых
колес
является обычным
цилиндрическим,
а другое –
коническим с
углом конусности
d. Колеса
передачи
могут быть
как прямозубыми,
так и
косозубыми.
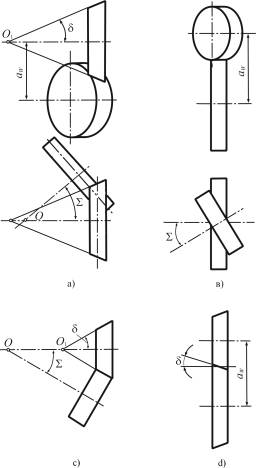
Цилиндро-конические
передачи
могут
преобразовать
вращательное
движение
между валами при
произвольном
расположении
осей колес в пространстве
(рис. 1).
|
|
Рис.
1. Схемы
цилиндро-конических
зубчатых передач
внешнего
зацепления: а)
передача на
перекрещивающихся
осях под
углом S колес; в)
винтовая
передача
(частный случай,
когда
коническое
колесо вырождается
в цилиндрическое);
с) передача
на
пересекающихся
осях
колес; d)
передача из
конических
колес на
параллельных
осях (частный
случай при S = 0) |
В
зависимости
от вида
производящих
элементов
геометро-кинематических
схем станочных
зацеплений
коническое
колесо цилиндро-конической
передачи
может быть
эвольвентным,
либо
неэвольвентным
[1].
Если
в качестве
производящего
элемента при
формировании
зубьев зубчатых
колес ЦКП
используется
инструментальная
рейка, то
боковая
поверхность
зубьев конического
колеса,
сопряженная
с эвольвентной
боковой
поверхностью
зубьев
цилиндрического
колеса
получается
эвольвентной,
т.к. ось станочного
зацепления L
параллельна
оси нарезаемого
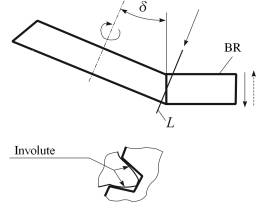
колеса (рис. 2). Такое
колесо называется
эвольвентно-коническим.
Оно нарезается
с переменным,
линейно-меняющимся
по ширине
венца
коэффициентом
смещения [3].
Цилиндро-коническая
передача в
этом случае
называется
эвольвентной.
|
|
Рис. 2. ГКС
станочного
зацепления
эвольвентного
конического
колеса |
Формирование
рабочих
поверхностей
эвольвентных
колес
цилиндро-конических
передач
посредством
производящей
пары, образованной
на базе
производящего
колеса, невозможно,
так как
относительное
движение
производящих
поверхностей
не совпадает
с заданным.
В
работах [1, 4, 5]
показана
возможность
формирования
на базе производящего
колеса
рабочих
поверхностей
неэвольвентных
цилиндро-конических
передач как
внешнего, так
и
внутреннего
зацепления.
Одним
из основных
преимуществ
цилиндро-конических
передач является
возможность
получения
таких
компоновочных
схем
приводов,
которые не могут
быть
реализованы
с помощью
традиционных
передач.
Рассмотрим
подробнее
схемы
передач.
I. ЦКП на
скрещивающихся
осях
Передача
(см. рис. 1, а)
формируется
при условии:
![]() . (1)
. (1)
Межосевое
расстояние в
передаче:
 ; (2)
; (2)
где d – угол
конусности
эвольвентно-конической
шестерни ,
m – модуль
зацепления,
z1, z2 –
числа зубьев колес,
b1, b2 –
углы наклона
зубьев колес.
Преимущества
передачи:
1.
В
передаче на
скрещивающихся
осях
удается при
заданном
межосевом угле
произвольно
располагать
колеса по
отношению к линии
кратчайшего
межосевого
расстояния
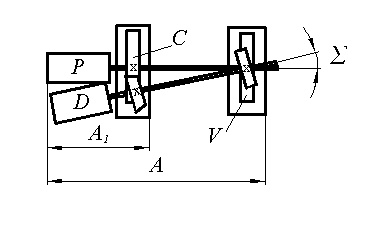
(рис. 3). Это дает
возможность
выполнить работоспособную
передачу при
сколь угодно
малом расстоянии
между валами
колес, способствует
уменьшению
габаритов
всего силового
агрегата (A1 < A) [4].
|
|
Рис.
3.
Компоновочные
преимущества
ЦКП D –
двигатель; P –
потребитель V – винтовая цилиндрическая передача C –
цилиндро-коническая
передача |
2.
В
ЦКП на
скрещивающихся
осях при
изменении
углов наклона
зубьев
степень точечности
контакта на одной
стороне зуба
уменьшается,
а на другой
стороне зуба
увеличивается. Это
позволяет на
стадии
проектирования
задавать
требуемую
степень
локализации
контакта. При
определенных
значениях
этих углов можно
получить
передачу с
односторонним
линейным
контактом
зубьев.
Условие
линейного
контакта
соответствующих
сторон
зубьев имеет
следующий
вид [1]:
tg a sin (b1 + b2) = tg d × cos b1, (3)
где a – угол
зацепления.
При
принятых
значениях d и b1 угол b2 определяется
из выражения:
![]() , (4)
, (4)
где ![]() .
.
3.
За
счет осевого
смещения
конической
шестерни в
осевом
направлении
можно регулировать
боковой
зазор в
зацеплении,
что является
важным для кинематически
точных передач.
Передачу
с линейным
контактом
зубьев
целесообразно
применять в
нереверсивных
приводах,
поскольку
линейный контакт
возможен
только при
работе одной
из сторон
зубьев.
II. ЦКП на
пересекающихся
осях
Если
в
цилиндро-конической
передаче на
скрещивающихся
осях обеспечивается
такое
взаимное
расположение
начальных
поверхностей,
при котором
их образующие
в начальной
плоскости
передачи
совпадают
между собой,
то
цилиндро-коническая
передача между
скрещивающимися
осями вырождается
в передачу
между
пересекающими
осями – коническую
передачу
(рис. 1, c).
Очевидным
условием
образования
такой передачи
является
соблюдение
равенств:
b1 = – b2; d = S . (5)
При
различных
комбинациях
значений и возможны
следующие
варианты:
а)
передачи,
составленные
из
косозубого эвольвентно-конического
и косозубого
цилиндрического
колес b1 = – b2; d ¹ 0;
б) передачи,
составленные
из
прямозубого
цилиндрического
и
прямозубого
конического
колеса b1 = b2 = 0; d1 ¹ 0 .
Преимущества
передачи.
1.
При
использовании
цилиндро-конической
передачи на пересекающихся
осях удается
получить
коническую
передачу со
сколь угодно
малым межосевым
углом S,
которую
реализовать
из обычных
конических
колес не
удается из-за
отсутствия
технологического
оборудования
для
изготовления
колес с большим
конусным расстоянием.
2.
Так
же как и в
передаче на
скрещивающихся
осях за счет
осевого смещения
конической
шестерни
возможна
регулировка
бокового
зазора в
зацеплении.
3.
Вследствие
точечности
контакта
передачи
мало
чувствительны
к погрешностям
монтажа и
изготовления.
4.
В
передачах на
пересекающихся
осях контакт рабочих
поверхностей
зубьев точечный
и степень
локализации
возрастает с
увеличением
межосевого
угла S.
Поэтому в силовых
приводах
целесообразно
применять такие
передачи,
только при
малых
межосевых углах
(S < 15°).
III. ЦКП на
параллельных
осях
Если
оба колеса
передачи
выполнить
эвольвентно-коническими,
то из них
может быть сформирована
передача
между
параллельными
осями (рис. 1, d) [6].
При
этом колеса
должны иметь
одинаковые углы
конусности d1 = d2 = d, установленные
вершинами
конусов
навстречу
друг другу, и
равные по
величине, но
противоположные
по знаку углы
наклона
линии зуба
инструмента
b1 = – b2.
В
этом случае
боковые
поверхности
зубьев колес
передачи
являются
эвольвентными
геликоидами,
имеющими
равные по
величине и
противоположные
по знаку углы
наклона
винтовых
линий на
основных
цилиндрах.
Преимущества
такой
передачи по
отношению к
передаче из
обычных
конических
или
цилиндрических
колес
следующие.
1.
В
передаче
контакт
зубьев
линейный,
поскольку
боковые
поверхности
зубьев колёс
являются
эвольвентными
геликоидами,
линейчатые
образующие
которых
совпадают,
что
обеспечивает
передаче
высокую
нагрузочную
способность.
2.
За
счёт
криволинейных
границ поля
зацепления коэффициент
перекрытия в
1,2…1,5 раза больше
(даже для прямозубых
колес), чем
для обычных цилиндрических
передач, что
повышает
плавность
работы
передачи.
3.
Осевым
смещением
колёс
навстречу
друг другу
можно изменять
межосевое расстояние
в передаче
или при
фиксированном
межосевом
расстоянии
устранять боковой
зазор между
зубьями
вплоть до
получения
беззазорного
зацепления, что
является
важным для
создания
кинематических
точных
передач.
4.
Путём
соответствующего
подбора
углов d и b можно
получить
передачу с
осевой силой
в зацеплении
при одном из
направлений
вращения
колёс равной
нулю. В этом
случае
одна из
боковых
поверхностей
зуба
является
эвольвентным
геликоидом, а
другая – эвольвентным
цилиндром.
При этом
должно соблюдаться
условие sin b = tg a tg d.
5.
Если
назначить
углы наклона
зубьев на
делительных
цилиндрах
одного знака
для обеих
сторон
зубьев, то
можно получить
передачу
одностороннего
действия, из
которой
легко
реализуется
механизм свободного
хода. Передача
формируется
при
выполнении условия
(sin b > tg a× tg d).
Эвольвентные
цилиндро-конические
передачи
могут быть сформированы
при любом
расположении
осей в
пространстве
(скрещивающиеся,
пересекающиеся,
параллельные
оси). При этом
ЦКП обладают
рядом
компоновочных,
эксплуатационных
и технологических
преимуществ по отношению
к передачам,
составленным
из обычных
цилиндрических
и конических
колес.
Наиболее
рационально
ЦКП
использовать
при
небольших
межосевых
углах (S < 20°) и
углах
конусности
ЭКК (d < 15°),
ширина
которого
ограничена
значениями коэффициентов
смещения на
его торцах.
Одним
из существенных
преимуществ
эвольвентных
ЦКП является
то, что
колеса
передач могут
быть
изготовлены
на том же
оборудовании
и с той же
степенью точности,
что обычные
цилиндрические
колеса. В
связи с этим
достижимая
технологическая
точность
колес ЦКП не
отличается
от обычных
цилиндрических зубчатых
колес, что
позволяет
применять такие
передачи в
высокоточных
тяжелонагруженных
приводах.
Литература
1.
Лопатин
Б.А., Цуканов
О.Н.
Цилиндро-конические
зубчатые
передачи: Монография.–
Челябинск:
Изд. ЮУрГУ, 2005. – 200
с.
2.
Лопатин
Б.А., Цуканов
О.Н. Цилиндро-конические
зубчатые
передачи. Международный
журнал
экспериментального
образования,
№ 11, 2012.: ИД
«Академия
Естествознания».
– С. 34-36.
3.
Справочник
по
геометрическому
расчету эвольвентных
зубчатых и
червячных
передач / Под.
ред. И.А.
Болотовского.
– 2-е изд.,
перераб. и
доп.– М.:
Машиностроение,
1986. – 448 с.
4.
Лопатин,
Б.А.
Цилиндро-конические зубчатые
зацепления
в приводах машин / Б.А.
Лопатин, О.Н.
Цуканов, С.В.
Плотникова //
Вестник
машиностроения.–
2003.– № 8.– С. 7 –
9.
5.
Плеханов
Ф.И., Лопатин Б.А.
Планетарная
передача. Патент
на
изобретение
№ 2550598. Опубликовано
10.05.2015 Бюл. № 13.
6.
Лопатин
Б.А.,
Плотникова
С.В.
Цилиндрическая
зубчатая
передача из
эвольвентно-конических
колес.// Наука
и
образование
в жизни современного
общества. – 2015. – Т. 8.
– С. 120 – 121.