Костоглотов А.А., Кузнецов А.А.,
Скрипкин И.Г.
Военный
авиационный инженерный университет, Россия
Интеллектуальный алгоритм идентификации параметров
информационно-измерительных систем
Известно, что для повышения точности
измерений информационно-измерительных систем (ИИС) необходимо решать задачу
одновременной идентификации параметров объекта измерений и параметров первичных
измерительных преобразователей ИИС [1].
Существующие алгоритмы
идентификации ИИС, построенные на базе классических методов статистического
синтеза, в условиях априорной неопределенности не всегда обеспечивают получение
требуемой точности сходящихся оценок искомых параметров [2]. Под априорной неопределенностью в рамках данной работы
понимаются условия, при которых значения параметров компонентов ИИС отклоняются
от номинальных значений и характер внешних воздействий неизвестен.
В сложившейся ситуации задача синтеза
алгоритмов идентификации, обеспечивающих в условиях априорной неопределенности
получение сходящихся высокоточных оценок измеряемых ИИС параметров и параметров
компонентов ИИС, весьма актуальна.
Помимо известных подходов к синтезу
алгоритмов идентификации, основанных на классических методах обработки
информации, существуют подходы, основанные на: стохастической аппроксимации; принципе
регуляризации [3]; концепции обратных задач динамики [4]. Из перечисленных
подходов наиболее перспективным представляется подход, основанный на принципе
регуляризации, поскольку задача идентификации параметров относится к обратным
задачам, которые, как правило, являются
некорректно поставленными.
Пусть динамика контролируемых ИИС
параметров описывается системой уравнений первого порядка
![]() (1)
(1)
где x(t)
- вектор параметров, ![]() неизвестное внешнее возмущение,
неизвестное внешнее возмущение, ![]() - переходная функция системы, непрерывная вместе с
производными по совокупности переменных.
- переходная функция системы, непрерывная вместе с
производными по совокупности переменных.
Уравнение наблюдения
имеет вид
![]() (2)
(2)
где сигнальная функция ![]() непрерывная по
совокупности переменных,
непрерывная по
совокупности переменных, ![]() - вектор белого гауссовского шума с известными локальными характеристиками,
- вектор белого гауссовского шума с известными локальными характеристиками,
![]() - векторная дельта-функция.
- векторная дельта-функция.
Ставится задача синтеза алгоритма получения
оценки ![]() , оптимальной в смысле минимума неотрицательного функционала
, оптимальной в смысле минимума неотрицательного функционала
![]() . (3)
. (3)
В силу непрерывности
переходной функции ![]() решения уравнения (1)
непрерывно зависят от
решения уравнения (1)
непрерывно зависят от ![]() [5]. Поэтому задача
определения оценки
[5]. Поэтому задача
определения оценки ![]() , доставляющей минимум (3), равносильна задаче определения
, доставляющей минимум (3), равносильна задаче определения
![]() (4)
(4)
Задача (1),(2),(4)
согласно [3] является некорректно поставленной и относится к задачам типа
оптимального управления. Решение данной задачи с использованием метода регуляризации
А.Н.Тихонова [3] и градиентных методов [6] представлено в работе [7]. При
решении использован сглаживающий функционал
![]()
![]() , (5)
, (5)
где ![]() - стабилизирующий
функционал [3],
- стабилизирующий
функционал [3], ![]() - параметр регуляризации, который традиционно [3,8] для
обеспечения сходимости и устойчивости подчинен условиям
- параметр регуляризации, который традиционно [3,8] для
обеспечения сходимости и устойчивости подчинен условиям
![]() < ∞. (6)
< ∞. (6)
В результате решения задачи
(1),(2),(4) получена система уравнений итеративного алгоритма идентификации
 (7)
(7)
где ![]() ; I – единичная
матрица.
; I – единичная
матрица.
Жесткое задание
параметра ![]() не учитывает характер
внешних воздействий. Для получения интеллектуального алгоритма, способного
адаптироваться к внешним воздействиям, необходимо согласовать значения
получаемых параметров регуляризации с измерительной информацией. Это достигается
путем определения параметра регуляризации с использованием градиентных методов
при условии минимума функционала невязки (3). В работе [7] представлено
выражение для параметра регуляризации, полученное с использованием метода
минимальных ошибок
не учитывает характер
внешних воздействий. Для получения интеллектуального алгоритма, способного
адаптироваться к внешним воздействиям, необходимо согласовать значения
получаемых параметров регуляризации с измерительной информацией. Это достигается
путем определения параметра регуляризации с использованием градиентных методов
при условии минимума функционала невязки (3). В работе [7] представлено
выражение для параметра регуляризации, полученное с использованием метода
минимальных ошибок
 . (8)
. (8)
Система уравнений (7) в совокупности с (8)
представляет собой интеллектуальный алгоритм идентификации на основе метода
минимальных ошибок,
Интеллектуальность алгоритма заключается в определении связи между
значением параметра регуляризации и текущей измерительной информацией.
Для определения свойств разработанного алгоритма было
проведено численное моделирование в среде MathCAD 11. Синтезированный алгоритм использовался для
решения задачи определения неизвестного параметра ![]() =0,2, определяемого конструктивными особенностями первичных
измерительных преобразователей ИИС, описываемых дифференциальным уравнением
=0,2, определяемого конструктивными особенностями первичных
измерительных преобразователей ИИС, описываемых дифференциальным уравнением
![]() ,
,
по
результатам наблюдения ![]() при наличии внешних
воздействий и ошибок измерений.
при наличии внешних
воздействий и ошибок измерений.
Результаты моделирования представлены на рис. 1 в виде
графиков оценок ![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() идентифицируемого параметра
идентифицируемого параметра ![]() . Где
. Где ![]() - оценка фильтра Калмана-Бьюси,
- оценка фильтра Калмана-Бьюси, ![]() ,
,![]() – второй и третьей итераций алгоритма (7) с вручную
подобранными параметрами регуляризации,
– второй и третьей итераций алгоритма (7) с вручную
подобранными параметрами регуляризации, ![]() ,
,![]() – второй и третьей итераций алгоритма на основе метода
минимальных ошибок.
– второй и третьей итераций алгоритма на основе метода
минимальных ошибок.
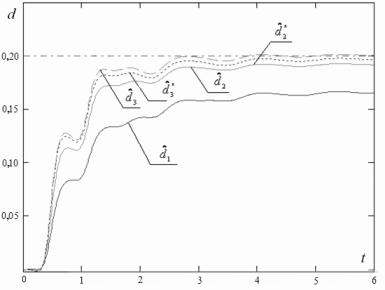
Рисунок 1
По результатам проведенного численного моделирования
было установлено, что разработанный алгоритм превосходит по точности получаемых
оценок на 10-15% фильтр Калмана-Бьюси, а также устойчив к повышению уровня
внешних воздействий и шумов каналов ИИС.
Литература:
1. Ранеев
Г.Г. и др. Информационно-измерительная техника и технологии – М.: Высшая школа,
2002.
2. Фарина А., Студер Ф. Цифровая обработка
радиолокационной информации. Сопровождение целей. – М.: Радио и связь. 1993.
3. Тихонов А.Н., Арсенин В.Я. Методы
решения некорректных задач. – М.: Наука. 1986.
4. Костоглотов А.А. Метод синтеза
оптимального алгоритма угловой стабилизации на основе объединенного принципа
максимума. // Автоматика и вычислительная техника. 2002. №5. С.26-34.
5. Карташев
А.П., Рождественский Б.Л. Обыкновенные дифференциальные уравнения и основы
вариационного исчисления. – М.: Наука, 1986.
6. Алифанов
О.М., Артюхин Е.А., Румянцев С.В. Экстремальные методы решения некорректных
задач. - М.: Наука, 1988.
7. Костоглотов А.А.,
Кузнецов А.А. Синтез интеллектуальной измерительной процедуры на основе метода
минимальных ошибок. // Измерительная техника. 2005. №7. С.8-13.
8. Детистов В.А.,
Таран В.Н. Синтез оптимального управления градиентным методом на основе
прогнозирующей модели. //Автоматика и телемеханика. 1990. №10. С.45-56.